На выходе СКВТ получается два напряжения — U2 и U3: первое изменяется пропорционально sin a, а второе —пропорционально cosa (рис. 17,6). Обмотки w2 и w3 обычно имеют одинаковые параметры, а поэтому наибольшие» значения напряжений U2наиб и U3наиб также одинаковы:
U2наиб = U3наиб=w2 /w1 U1 ,
где Ut — напряжение на входе ВТ, т. е. на зажимах обмотки возбуждения w1
Полная взаимная компенсация поперечных составляющих потоков обмоток ротора происходит при равенстве нагрузочных сопротивлений в синусной и косинусной цепях вращающегося трансформатора. Такая компенсация поперечных составляющих потоков реакции вторичных обмоток называется вторичным симметрированием. Особенностью его является то, что при его осуществлении входное сопротивление ВТ , а => и потребляемый от сети ток при постоянном Uп не зависят от угла поворота ротора α. А вот вых. Сопротивление зависит.
Если же нагрузочные сопротивления Z'H и Z''Н не равны, то вторичное симметрирование получается неполным, так как поперечные составляющие Ф2q и Ф3q взаимно компенсируются лишь частично, и в магнитной цепи ВТ появляется магнитный поток, направленный по поперечной оси:
Фq= Ф2q + Ф3q.
Этот поток наводит в роторных обмотках э. д. с. самоиндукции, что ведет к искажению заданных функциональных зависимостей выходных напряжений.
Для получения линейной зависимости выходного напряжения от угла поворота ротора а необходимо, чтобы это напряжение определялось уравнением:
U2= (w2 /w1 )U1  ,
(11,9)
,
(11,9)
где т — величина постоянная, определяемая магнитными и электрическими параметрами ЛВТ.
Рис. 18.
Зависимость Рис. 19 - ЛВТ со вто- Рис. 20
- Принци
ЛВТ U2=f(a) ричным симметрированием пиальная схема ЛВТ
с первичным симметрированием
При m≈0,54 зависимость (11,9) получается линейной с точностью до
1% в пределах изменения угла поворота а от 0 до 60° (рис.18). Для получения
указанной зависимости U2=f(a) применяют следующую
схему включения обмоток ЛВТ: синусную обмотку соединяют последовательно с
компенсационной обмоткой, а косинусную обмотку замыкают на некоторое
неизменное сопротивление Zc (рис. 196).
При этом величина сопротивления Zc выбирается
такой, чтобы обеспечить полное вторичное симметрирование обмоток
при заданной нагрузке ZH. ,
Для полного вторичного симметрирования обмоток необходимо, чтобы полное сопротивление цепи косинусной обмотки было равно удвоенному полному сопротивлению цепи синусной обмотки (включая сопротивления компенсационной обмотки ZK и нагрузки ZH). Особенностью ЛВТ вторичной симметрией – зависимость вых. сопротивления не постоянное, что ограничивает его применение. Вх. – постоянно.
Однако полное вторичное симметрирование обмоток возможно лишь при неизменной нагрузке ЛВТ (ZH = const). В случае переменной нагрузки ЛВТ применяется схема первичного симметрирования обмоток (рис.20), в которой обмотка возбуждения включается последовательно с косинусной обмоткой и сопротивлением Zc, а компенсационная обмотка замыкается на некоторое сопротивление ZН.К. Сопротивления Zc и ZН.к выбираются такими, чтобы магнитный поток компенсационной обмотки ФК и поперечный поток косинусной обмотки Ф3q были взаимно скомпенсированы при любом значении угла а. Особенностью ЛВТ первичной симметрией – независимость вых. сопротивления от углаα.
Вращающийся трансформатор-построитель (ПВТ)
Вращающиеся
трансформаторы-построители применяются для решения геометрических задач.
Так, с помощью ПВТ можно определить гипотенузу и угол прямоугольного
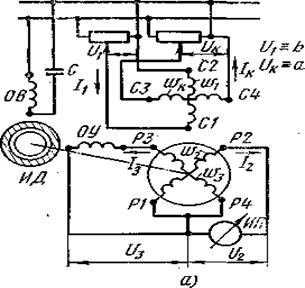
треугольника по двум заданным катетам. На рис.21,а представлена схема
включения обмоток ПВТ. Обмотки возбуждения и компенсационную включают ![]()
![]()
![]()
![]() в сеть через потенциометры,
позволяющие устанавливать на входе этих обмоток напряжения U1
и UK. Роторную обмотку ω2
включают на измерительный прибор ИП, отградуированный в линейных единицах; роторная обмотка w3 питает обмотку управления ОУ исполнительного двигателя ИД. Обмотка
возбуждения исполнительного двигателя включена в сеть через конденсатор С.
Вал исполнительного двигателя механически соединен с валом ПВТ.
в сеть через потенциометры,
позволяющие устанавливать на входе этих обмоток напряжения U1
и UK. Роторную обмотку ω2
включают на измерительный прибор ИП, отградуированный в линейных единицах; роторная обмотка w3 питает обмотку управления ОУ исполнительного двигателя ИД. Обмотка
возбуждения исполнительного двигателя включена в сеть через конденсатор С.
Вал исполнительного двигателя механически соединен с валом ПВТ.
Допустим, что известны катеты а и b прямоугольного треугольника (рис.21,6). В определенном масштабе величины этих катетов могут быть выражены напряжениями U1 и UK, которые подаются на вход обмоток w1 и wK посредством потенциометров. Токи в обмотках статора I1и Iк создают в ненасыщенной магнитной системе ПВТ взаимно перпендикулярные магнитные потоки Ф1и Фк, пропорциональные заданным напряжениям на входе обмоток. Вектор результирующего магнитного потока Ф, равного геометрической сумме векторов Ф1и Фк , расположится относительно
|
|
Рис. 21- Вращающийся трансформатор-построитель
векторов Ф1и Фк под теми же углами, что и гипотенуза с относительно катетов а и b (рис.21, в). Результирующий поток статора Ф, сцепляясь с обмотками ротора, наводит в них э. д. с. Е2 и Es.
Э. д. с. Е3 создаете цепи ОУ исполнительного двигателя ток I3. В результате ротор двигателя приходит во вращение, поворачивая ротор ПВТ.
Э. д. с. Е2, создавая напряжение U2 на зажимах измерительного прибора, приводит его в действие. Исполнительный двигатель поворачивает ротор ПВТ до тех пор, пока обмотка w3 не займет положение, перпендикулярное результирующему потоку Ф. В этом случае э. д. с. Е3 и ток в обмотке управления двигателя станут равными нулю, и двигатель остановится.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.