Круговое вращающееся поле при амплитудном управлении независимо от режима работы двигателя имеет место при α е = 1, т. е. когда Uy=UB'=Uyo. Напряжение управления Uy0, соответствующее круговому полю, обычно принимается за номинальное. При всех других напряжениях управления Uy не равное Uyo поле двигателя эллиптическое, при Uy =0 — пульсирующее. Реверс двигателя при амплитудном управлении достигается путем изменения фазы напряжения управления на полпериода (180°).
При фазовом управлении (рис. 2, б) на обмотку возбуждения, так же как и при амплитудном управлении, подается напряжение сети (UB = U1= const). На обмотку управления подается постоянное по значению (амплитуде), равное приведенному напряжению возбуждения (UB'=UB/k) напряжение управления Uy=Uy0, которое в процессе регулирования изменяется по фазе (β=var). Величина сигнала управления обычно оценивается коэффициентом сигнала, за который здесь принимается sin β.
При сдвиге Uy и UB на четверть периода (90°), т. е. при sin β = 1, в двигателе независимо от режима работы (частоты вращения) имеет место круговое вращающееся поле. При 0 <sin β < l поле эллиптическое; при sin β = 0 — пульсирующее; при sin β <0 ротор двигателя изменяет направление вращения.
Амплитудно-фазовое управление асинхронным исполнительным двигателем в схемах автоматики осуществляется одним из двух способов: 1) в двигателях, у которых напряжение на обмотке возбуждения постоянно равно напряжению сети (Uв=U1= const), путем одновременного изменения, как по значению, так и по фазе напряжения управления Uу; 2) в двигателях, у которых последовательно с обмоткой возбуждения включается фазосдвигающий конденсатор (в конденсаторных двигателях) путем изменения напряжения управления Uу только по значению — амплитуде (рис.2, в).
На первый взгляд, второй способ является не амплитудно-фазовым, а амплитудным, однако это не так. Дело в том, что при изменении напряжения Uу по амплитуде в конденсаторном двигателе одновременно как по значению, так и по фазе изменяется напряжение непосредственно на обмотке возбуждения.
Изменение (регулирование) частоты вращения исполнительных двигателей при всех рассмотренных выше способах управления происходит за счет изменения характера—деформации вращающегося магнитного поля. Уменьшение частоты вращения достигается путем увеличения эллиптичности — возрастания обратно вращающегося поля, которое создает тормозящий момент. Недостатком такого регулирования является его неэкономичность. Наряду с рассмотренными выше тремя основными способами регулирования частоты вращения асинхронных исполнительных двигателей на практике, хотя и значительно реже, находят применение и некоторые другие способы регулирования: 1) регулирование пространственным сдвигом осей обмоток; 2) подмагничиванием постоянным током; 3) частотное регулирование; 4) импульсное регулирование и др.
С целью обеспечения устойчивой работы двигателя во всем диапазоне частот вращения от n=0 до n = nс, расширения зоны регулирования, а также устранения самохода асинхронные исполнительные двигатели изготовляются с роторами, имеющими большое активное сопротивление. Критическое скольжение асинхронных исполнительных двигателей в отличие от обычных асинхронных двигателей (у которых sK=0,1...0,5), всегда больше единицы. На рис. 3 представлены для сравнения механические характеристики обычного и исполнительного двигателей. Части характеристик, обеспечивающие устойчивую работу, выделены жирными линиями.
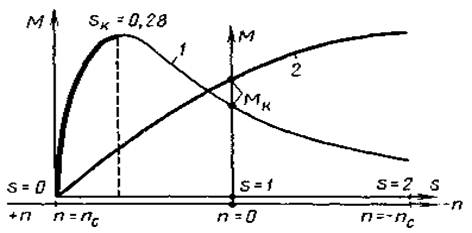
Рис. 3 - Механические характеристики асинхронных двигателей обычного — силового (1) и исполнительного (2)
Увеличение активного сопротивления ротора, обеспечивая необходимые исполнительному двигателю свойства, приводит к уменьшению механической мощности на валу и КПД. Номинальная мощность исполнительного двигателя примерно в 2...3 раза меньше номинальной мощности обычного двигателя того же габарита.
В настоящее время в качестве асинхронных исполнительных двигателей применяются исключительно двигатели с короткозамкнутыми роторами. В зависимости от конструкции ротора асинхронные исполнительные двигатели можно разделить на двигатели с полым немагнитным ротором, на двигатели с обычным ротором, имеющим обмотку, выполненную в виде «беличьей клетки», и на двигатели с полым ферромагнитным ротором.
Самоход и пути его устранения.
Самоходом называется вращение ротора асинхронного исполнительного двигателя при отсутствии сигнала управления (ае=0; sin p=0; a=0). На практике встречаются два вида самохода:
1. параметрический самоход, причиной которого является неправильный выбор параметров двигателя при его проектировании;
2. технологический самоход, появляющийся из-за технологических допусков и низкокачественного изготовления двигателя.
Параметрический самоход обычно проявляется при снятии сигнала управления у двигателя, работающего с малым моментом сопротивления на валу,— его ротор продолжает вращаться и после того, как с обмотки управления снят сигнал.
При снятии сигнала управления исполнительный двигатель практически становится однофазным. Известно, что если ротор обычного силового однофазного асинхронного двигателя приведен во вращение с помощью пусковой обмотки, то он не остановится и после отключения этой обмотки (соответствующей у исполнительных двигателей обмотке управления) при условии, что момент сопротивления будет не больше момента, развиваемого двигателем. Такое явление — явление самохода — недопустимо в исполнительных двигателях, так как в этом случае двигатель становится неуправляемым. Ротор исполнительного двигателя должен вращаться лишь при наличии сигнала (напряжения) на обмотке управления.
С целью устранения самохода асинхронные исполнительные двигатели изготовляют с повышенным активным сопротивлением ротора. Увеличение активного сопротивления ротора, как известно, смещает максимум механической характеристики в сторону меньших скоростей (больших скольжений s), в результате чего результирующий момент двигателя в однофазном режиме, являющийся суммой моментов от прямого и обратного полей, уменьшается а в том случае, когда критическое скольжение равно или больше единицы, становится даже отрицательным.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.