Существенным недостатком двигателей с полым и массивным ферромагнитными роторами является то, что их роторы при неравномерном воздушном зазоре, чего практически трудно избежать в процессе производства, испытывают радиальные силы тяжения к статору, что увеличивает момент трения в подшипниках, уменьшает срок их службы, а у некоторых двигателей приводит к залипанию ротора.
Исполнительные двигатели с полым, а также массивными ферромагнитными роторами иногда используются при высоких температурах окружающей среды, особенно при необходимости высоких и сверхвысоких (60 000... 100 000 об/мин) частот вращения. Иногда их поверхности никелируют, что позволяет повысить использование двигателей.
Электромеханическая постоянная времени асинхронных исполнительных двигателей
Электромеханическая постоянная времени асинхронных исполнительных двигателей может быть определена аналогично электромеханической постоянной времени исполнительных двигателей постоянного тока:
Tмех= JΩ0 / Mпуск
В случае прямолинейной механической характеристики Tмех равна времени разгона ротора двигателя в режиме холостого хода от Ω=0 до Ω=0,633Ω0.
У асинхронных исполнительных двигателей механические характеристики нелинейные. Во всем диапазоне частот вращения от v=0 до v=v0 кривая вращающего момента двигателя m=f(v) лежит выше прямой, проведенной через точки mпуСк (v=0) и v0 (m=0). Это значит, что реальная Тмех двигателя будет меньше, чем Тмех, определенная по выражению. Однако разница эта небольшая. Следует иметь в виду также, что Tмех определена без .учета времени протекания электромагнитных процессов.
На величину Tмех кроме указанных выше факторов влияет также частота питающей сети f1 и число пар полюсов р, которые определяют частоту вращения при идеальном холостом ходе:
n1 = 60f1 / p.
Значения Тмхе при круговом вращающемся поле для большинства асинхронных исполнительных двигателей, выпускаемых в настоящее время; приведены в табл. 1.
Таблица 1
|
Асинхронный исполнительный двигатель |
Электромеханическая постоянная времени Т ех [с] при частоте тока ft[Гц] |
|
|
50 |
400-500 |
|
|
С полым немагнитным ротором С короткозамкнутым ротором: а) обычной конструкции б) сквозной конструкции С полым ферромагнитным ротором |
0,005-0,1 0,2-1 - 1-2 |
0,02-0,15 0,3-1,5 0,007-0,06 1,5-3 |
ВРАЩАЮЩИЕСЯ ТРАНСФОРМАТОРЫ
Вращающиеся (поворотные) трансформаторы (ВТ) – это небольшие индукционные электрические машины, предназначенные для преобразования механического перемещения – угла поворота ротора α – в электрический сигнал – выходное напряжение U, амплитуда которого находится в определенной функциональной зависимости от угла поворота ротора.
По конструкции ВТ схож с асинхронной машиной, выполненной с фазным ротором (рис.15). Он состоит из корпуса 1, шихтованного сердечника статора 2 с обмотками 3, шихтованного сердечника ротора 4 с обмотками 5, контактных колец 6 и щеток 7.
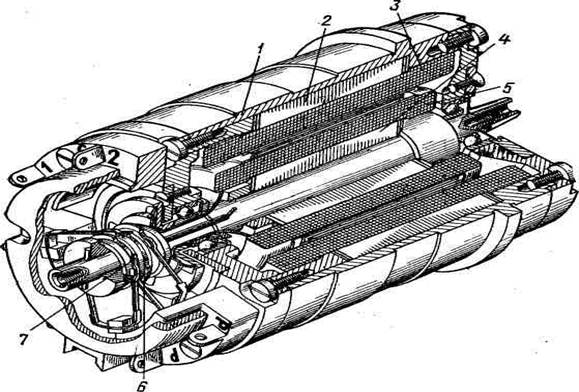
Рис. 15 - Устройство вращающегося трансформатора
На статоре ВТ обычно располагают две распределенные обмотки, сдвинутые в пространстве относительно друг друга на 90 эл. град. Обмотки статора могут быть разделенными или соединенными по мостиковой схеме (см. рис. 7). Одна из обмоток статора называется обмоткой возбуждения и подключается к „сети переменного тока; другая называется компенсационной и ее схема включения зависит от назначения ВТ. Обычно обе обмотки статора имеют одинаковое число витков (ωS = ωK) и одинаковые активные сопротивления.
В пазах ротора расположены также две взаимно перпендикулярные обмотки , называемые вторичными Они также выполняются одинаковыми (ωA = ωB; rA=rB; xA=xB) . Схема соединения их зависит от назначения ВТ.
Выводы обмоток, расположенных на статоре, обозначают С/, С2, СЗ и С4, в отличие от обмоток, расположенных на роторе, выводы которых обозначают Р1, Р2, РЗ и Р4.
Ротор ВТ может поворачиваться относительно статора на некоторый угол или вращаться. Электрический контакт с обмотками ротора осуществляется либо посредством контактных колец, по которым скользят щетки (рис.1), либо посредством спиральных пружин из латуни, если ВТ работает в режиме ограниченного поворота. В последнем случае угол поворота ротора ограничивается максимальным углом закручивания спиральных пружин и надежность таких ВТ, не имеющих скользящих контактов, значительно выше.
Принцип работы ВТ основан на том, что при повороте его ротора взаимная индуктивность между обмотками статора и ротора изменяется в определенной функциональной зависимости от угла поворота. При этом э. д. с, наводимые в обмотках ротора пульсирующим магнитным потоком, строго следуют этой зависимости. При подключении обмотки возбуждения к сети переменного тока в машине возникает продольный магнитный поток Фd , пульсирующий во времени с частотой сети. При х.х. в обмотках неподвижного ротора этот поток индуцирует ЭДС, частота которых равна частоте сети, а действующее значение зависит от положения ротора относительно статора.
Поворот ротора ВТ осуществляется посредством редукторного механизма высокой точности, который либо встраивается в корпус машины, либо изготавливается отдельно, а затем соединяется с валом ВТ.
Если ВТ предназначен для работы в режиме поворота ротора в пределах определенного угла, то обмотки возбуждения и компенсационную располагают на статоре, а вторичные — на роторе. В случае работы ВТ в режиме непрерывного вращения ротора обычно применяют «обратное» расположение обмоток: обмотки возбуждения и компенсационную располагают на роторе, а вторичные— на статоре. Если компенсационная обмотка замыкается накоротко, то при обратном расположении обмоток на роторе будет лишь два контактных кольца, что имеет большое значение при больших частотах вращения ротора.
Их отличительной особенностью является, во-первых, более тщательное изготовление, во-вторых, меньшие магнитные и электрические нагрузки, что диктуется требованиями точности, которые предъявляются к ВТ как к информационным электрическим машинам.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.