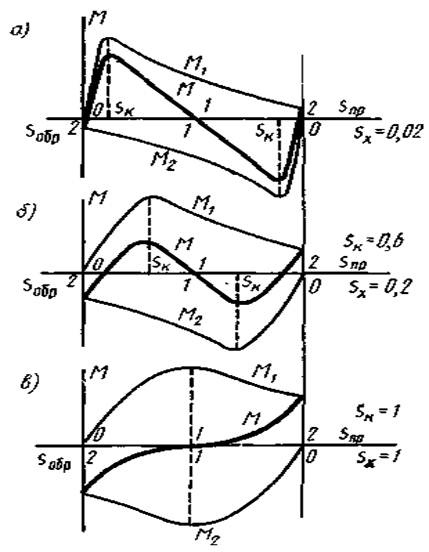
Рис. 4 - К вопросу об устранении параметрического самохода: sK — критическое скольжение; sx — скольжение при холостом ходе; М1, Мг — вращающие моменты от прямого и обратного полей
На рис. 4 представлены механические характеристики трех двигателей с различными активными сопротивлениями ротора в однофазном режиме (при отсутствии напряжения на обмотке управления). Первые характеристики (рис.4, а) принадлежат двигателю с малым сопротивлением ротора (sK=0,2); вторые (рис.4, б) — двигателю с несколько увеличенным сопротивлением (sK = 0,6); третьи (рис 4, в) — двигателю с большим сопротивлением ротора (sK= 1). Результирующий момент М первого и второго двигателей, являющийся суммой моментов от прямого М1 и обратного М2 полей в зоне двигательного режима (0<s<l), положительный. Это значит, что эти двигатели будут иметь самоход — их роторы будут вращаться и при снятии сигнала (напряжения) управления. Результирующий момент третьего двигателя с повышенным активным сопротивлением ротора при 0<s<l отрицательный (тормозной). Это значит, что ротор двигателя при снятии напряжения управления будет сравнительно быстро останавливаться. Время его остановки будет в этом случае даже меньше, чем при одновременном снятии напряжений с обеих обмоток (управления и возбуждения). Последнее объясняется тем, что при снятии только напряжения управления двигатель развивает отрицательный — тормозной — момент, в то время как при снятии напряжений с обеих обмоток двигателя момент, развиваемый двигателем, равен нулю.
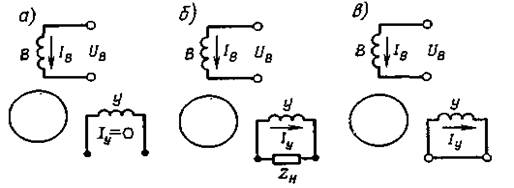
Рис. 5 - Способы снятия сигнала управления.
В реальных схемах автоматики снятие сигнала управления может производиться тремя способами (рис.5):
1. в одних схемах, например при питании обмотки управления от электронного усилителя — с разрывом цепи управления: ZH=co (рис.5, а);
2. в других, например при питании обмотки управления от магнитного усилителя,— с включением обмотки управления на некоторое сопротивление ZН=Zвых усилителя (рис.5, б);
3. в третьих, например при питании обмотки управления от потенциометра,— с замыканием ее накоротко: ZН = 0 (рис. 5, в).
Легче всего устраняется самоход в третьем случае, когда ZH= =0, и во втором случае, когда ZH = rн+jxH. Объясняется это тем, что ротор двигателя при вращении в этих случаях затрачивает часть своей энергии на покрытие потерь в замкнутой накоротко обмотке управления или в ней и в выходной обмотке усилителя от токов, вызываемых ЭДС, наводимой в обмотке управления магнитным потоком вращающегося ротора. Сложнее устранить самоход в первом случае, когда ZH= со, и во втором случае, когда обмотка управления замыкается не накоротко, а на некоторое сопротивление, например на емкость при наличии конденсатора в цепи управления.
В случае технологического самохода неподвижный до этого ротор двигателя начинает вращаться сразу же после включения под напряжение лишь одной обмотки возбуждения.
Причиной технологического самохода является возникновение слабого эллиптического поля, обусловленного либо короткозамкнутыми витками (в обмотке статора или в пакете стали статора из-за их плохой изоляции), либо неравенством магнитной проводимости двигателя в различных радиальных направлениях, вызванной неравенством магнитной проводимости стали вдоль и поперек проката (особенно холоднокатаной), неравномерностью воздушного зазора или разностенностью полого ротора.

Рис.6 - Причины возникновения технологического самохода: а — наличие короткозамкнутых витков; б — неравенство магнитных проницаемостей стали (μd >μq); в —неравномерность воздушного зазора (δd >δq)
Во всех этих случаях магнитный поток двигателя можно разделить на две части и рассматривать как два потока Ф' и Ф» (рис.6), сдвинутые во времени и в пространстве, что, приводит к возникновению эллиптического поля.
Для устранения технологического самохода необходимо высококачественное изготовление двигателя: тщательная изоляция обмотки и листов стали, точная механическая обработка деталей, обязательная сборка пакетов стали статора и ротора «веером» — смещение при сборке каждого последующего листа на одно или несколько зубцовых делений относительно предыдущего.
Асинхронные исполнительные двигатели с полым немагнитным ротором.
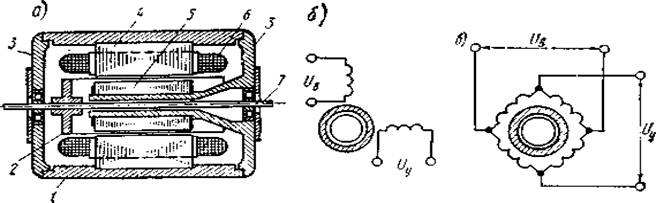
Рис. 7 - Асинхронный исполнительный двигатель с полым немагнитным ротором: а — продольный разрез; б — раздельная схема обмоток статора; в — мостиковая схема обмоток статора.
Конструктивное устройство одного из двигателей с полым немагнитным ротором представлено на рис.7. Двигатель состоит из внешнего статора 4; внутреннего статора-сердечника 5; ротора, выполненного в виде полого немагнитного цилиндра 2; корпуса 1, подшипниковых щитов 3 и вала 7. Внешний статор ничем не отличается от статора обычного асинхронного двигателя. Он набирается из изолированных друг от друга листов электротехнической стали. В пазах статора располагаются его обмотки 6: управления и возбуждения, сдвинутые в пространстве на 90 эл. град. Эти обмотки либо изолированы друг от друга, либо соединены по мостиковой схеме. Мостиковая схема представляет собой замкнутую обмотку с отпайками через 90 эл. град. Она позволяет просто осуществить пространственный сдвиг обмоток точно на 90 эл. град., способствует лучшему распределению токов и потерь в обмотке. К недостаткам ее следует отнести, во-первых, электрическую связь цепей возбуждения и управления, а во-вторых, большое число параллельных ветвей (2α) и отпаек — концов при большом числе пар полюсов (2α = 2р), в-третьих, постоянство коэффициента трансформации k=ωВ / ωА.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.