Введение
Исполнительными(или управляемыми) двигателями называются двигатели, предназначенные для преобразования электрического сигнала – амплитуды напряжения управления или его фазы – в механическое перемещение – вращение вала.
В системах автоматики и телемеханики, в схемах управления, регулирования и контроля находят широкое применение самые различные исполнительные двигатели, отличающиеся друг от друга по роду тока, частоте питающей сети, угловой скорости вращения и др. (рис. 1). Исполнительные двигатели являются весьма важными элементами схем автоматики и телемеханики. От качества работы исполнительных двигателей во многом зависит качество работы всей, часто очень сложной системы.
Особенностью режима работы исполнительных двигателей автоматических систем является то, что они практически никогда не работают в номинальном режиме — при номинальной частоте вращения. Для их работы в отличие от обычных, силовых, двигателей характерны частые пуски, остановки, реверсы. С целью сокращения времени переходных процессов, в которых почти постоянно находятся исполнительные двигатели, их стремятся выполнить малоинерционными.
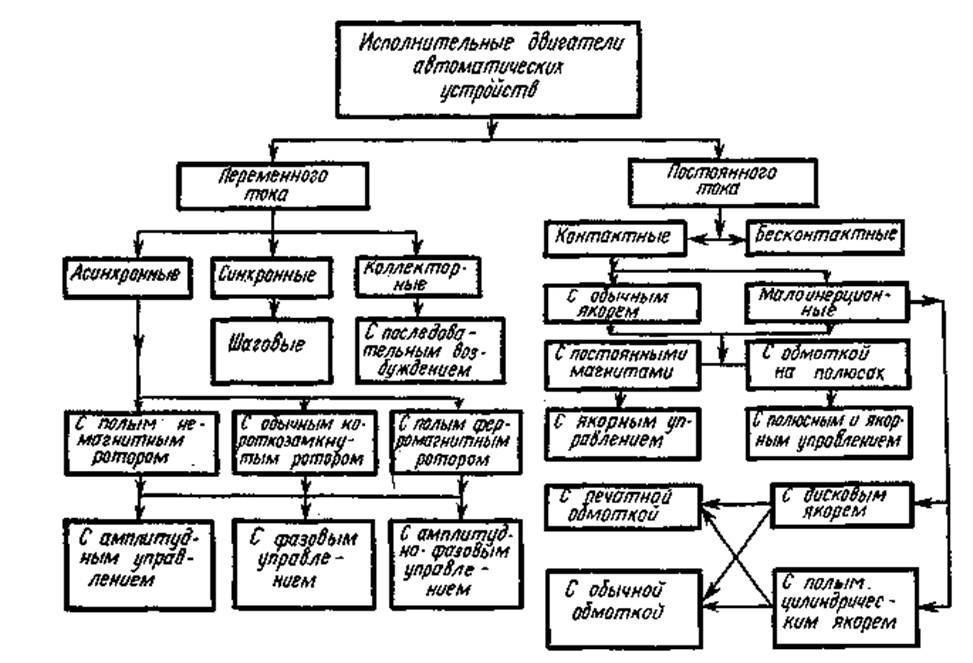
Рис. 1 - Классификация исполнительных двигателей автоматических устройств
Конструктивной особенностью исполнительных двигателей является то, что они практически никогда не снабжаются вентиляторами для обеспечения самовентиляции (охлаждения), что объясняется, во-первых, малым значением рабочей частоты вращения в следящей системе, а во-вторых, нежеланием увеличивать момент инерции ротора.
В настоящее время в качестве исполнительных двигателей используются: а) двухфазные асинхронные двигатели с повышенным активным сопротивлением ротора; б) двигатели постоянного тока с независимым возбуждением или постоянными магнитами; в) бесконтактные двигатели постоянного тока; г) синхронные —шаговые двигатели.
Почти все исполнительные двигатели (исключение составляют лишь двигатели с постоянными магнитами и некоторые шаговые двигатели) имеют две обмотки. На одну из них— обмотку возбуждения — постоянно подается напряжение питающей сети. На другую — обмотку управления — электрический сигнал управления подается лишь тогда, когда необходимо вращение вала.
От значения (или фазы) напряжения управления зависит вращающий момент исполнительного двигателя, частота вращения его ротора, а следовательно, и развиваемая им мощность.
Характер требований, предъявляемых к исполнительным двигателям, определяется спецификой их работы в следящих системах. Такие требования, как максимум полезной мощности, высокие КПД и cos ф, которые являются основными для обычных силовых электродвигателей у исполнительных двигателей смещаются на второй план — они не являются определяющими при оценке качества исполнительных двигателей.
Основные требования, предъявляемые к исполнительным двигателям, таковы: 1) отсутствие самохода — самоторможение двигателя при снятии сигнала управления; 2) устойчивость работы во всем диапазоне угловых скоростей; 3) максимальная линейность механических и регулировочных характеристик; 4) большой пусковой момент; 5) хорошее быстродействие; 6) малая мощность управления; 7) широкий диапазон регулирования частоты вращения; 8) малое напряжение трогания; 9) надежность в работе; 10) малые габаритные размеры и масса.
Необходимость строгого выполнения тех или иных требований определяется назначением и областью применения исполнительного двигателя. К исполнительным двигателям, предназначенным для работы в следящих системах точных приборов автоматики и вычислительной техники, предъявляются повышенные требования в отношении отсутствия самохода, линейности характеристик, быстродействия и т. п. К исполнительным двигателям, предназначенным для работы в автоматических устройствах общепромышленного назначения, предъявляются повышенные требования в отношении энергетических показателей (КПД, cos φ), использования активных материалов и т. п. Например, для двигателей, работающих при постоянном, значительном по величине моменте сопротивления не обязательно выполнение требования отсутствия самохода при холостом ходе (М=0); для моментных двигателей, работающих в стопорном режиме (при и=0), не обязательно выполнение требования линейности механических и регулировочных характеристик и т. п.
Общие сведения.
По своей конструкции асинхронные исполнительные двигатели—это двухфазные двигатели, имеющие на статоре две сдвинутые в пространстве на 90 эл. град обмотки (рис.2): обмотку возбуждения В, непосредственно подключенную к сети, и обмотку управления У, на которую подается управляющий сигнал, изменяющийся по величине или фазе.
Для того чтобы токи обмоток создавали вращающееся магнитное поле, необходим их сдвиг во времени. В схемах автоматики сдвиг токов (напряжений) во времени достигается различными путями: за счет схем управления, фазовращателей, конденсаторов или различных преобразователей. Наилучшие энергетические показатели, наибольшую мощность исполнительные двигатели развивают при круговом вращающемся поле, которое получается в случае сдвига токов в обмотках управления Iу и возбуждения Iв на четверть периода (90°) при равенстве амплитуд магнитодвижущих сил обмоток Fym=Fвm.
Регулирование частоты вращения асинхронных исполнительных двигателей — управление двигателями — на практике чаще всего осуществляется одним из трех способов: либо путем изменения значения (амплитуды) напряжения управления при неизменной его фазе — амплитудное управление, либо путем изменения фазы напряжения управления при неизменной его величине — фазовое управление, либо путем одновременного изменения амплитуды напряжения управления и угла фазового сдвига между напряжениями управления и возбуждения — амплитудно-фазовое управление. Каждому способу управления соответствует вполне определенная схема включения исполнительного двигателя (см. рис.2).
Рис. 2 - Схемы включения асинхронных исполнительных двигателей при различных способах управления: а — амплитудном; б — фазовом, в — амплитудно-фазовом (конденсаторный сдвиг фаз)
При амплитудном управлении (рис.2,а) обмотка возбуждения В подключается к сети UB=U1= const. На обмотку управления У подается напряжение Uу, сдвинутое на четверть периода (β= 90°) относительно напряжения возбуждения UВ. Значение напряжения управления, изменяющегося в процессе регулирования по амплитуде, обычно выражают в относительных единицах как отношение Uy к приведенному (к числу витков обмотки управления) напряжению возбуждения UB, называя это отношение (α) эффективным коэффициентом сигнала:
α е=UУ /U’В= UУ /(UВ /k),
где k=wB / wy — коэффициент трансформации; wy, wB — эффективные числа витков обмоток.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.