При вращении ротора его «волокна» пересекают поток возбуждения и в них, кроме э. д. с. трансформации, наводятся еще э. д. с. вращения (резания). Под действием э. д. с, вращения по ротору протекают токи, контуры которых при большом активном сопротивлении ротора практически совпадают с осью потока возбуждения Фd1 (рис.9, б). Эти токи создают магнитный поток ротора Фq2, который направлен по поперечной оси тахогенератора. Поток Фq2 сцепляется с витками генераторной обмотки ОГ и наводит в них э. д. с. Eтг — выходную э. д. с. тахогенератора. Так как поток Фq2 изменяется с частотой сети, то и частота выходной э. д. с. равна частоте сети и не зависит от частоты вращения ротора.
Э. д. с. ротора, а следовательно, поток Фq2 и выходная э. д. с, пропорциональны частоте вращения ротора:
Eтг= Фq2=n.
Выходное напряжение тахогенератора UТГменьше э. д. с. ЕТГ на величину падения напряжения в- rгенераторной обмотке с сопротивлением Zr.
Основными требованиями, предъявляемыми к выходной характеристике асинхронного тахогенератора Uтг = f(n), являются:
· линейность Uтг =n;
· постоянство фазы Uтг при изменении п;
· наибольшая крутизна — большое ∆Uтг при малых ∆n;
· симметрия— постоянство \Uтг\ при вращении ротора в различных направлениях с одинаковыми частотами вращения;
· стабильность — независимость выходной характеристики от температуры, условий эксплуатации, времени и т. п.
Особенно жесткие требования предъявляются к выходной характеристике тахогенераторов, работающих в счетно-решающих устройствах (в дифференцирующих и интегрирующих схемах).
Выходное напряжение Uтг не является линейной функцией частоты вращения v. Нелинейность появляется за счет члена Bv2. Если бы он был равен нулю, то Uтг было бы пропорционально v и тахогенератор был бы идеальным.
При проектировании тахогенераторов член Bv2 стараются уменьшить. Последнее достигается за счет снижения как v, так и В.
Чтобы уменьшить относительную частоту вращения тахогенераторы проектируют на большую частоту ft с наименьшим числом пар полюсов р. Обычно р≥2. Тахогенераторы с р = 1 стараются не проектировать, так как при этом трудно бороться с возникающей магнитной и электрической асимметрией.
![]()
![]()
![]()
![]() Чтобы
уменьшить В, работают при больших сопротивлениях нагрузки ZH, а ротор тахогенератора (для увеличения rгв) выполняют из материалов с большим удельным сопротивлением — фосфористой или марганцовистой бронзы или из сплавов
типа манганин, нейзильбер.
Чтобы
уменьшить В, работают при больших сопротивлениях нагрузки ZH, а ротор тахогенератора (для увеличения rгв) выполняют из материалов с большим удельным сопротивлением — фосфористой или марганцовистой бронзы или из сплавов
типа манганин, нейзильбер.
|
|
К уменьшению коэффициента трансформации и сопротивления обычно не прибегают, так как первое ведет к снижению крутизны выходной характеристики, а второе — к увеличению габаритов тахогенератора.
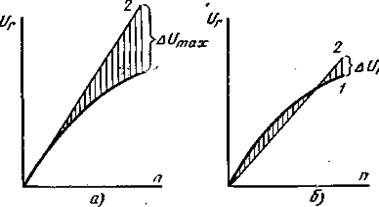
Отклонение реальной 1 выходной характеристики UTГ = f (n) от идеальной 2 (прямолинейной) называется амплитудной погрешностьютахогенератора ∆U (рис. 10). Амплитудная погрешность определяется как отношение (выраженное в процентах) величины отклонения реальной выходной характеристики от идеальной (∆Uшах) к максимальной э. д. е. генераторной обмотки Етгmах. При настройке схемы тахогенератор нужно откалибровать (установить наклон идеальной характеристики) таким образом, чтобы амплитудная погрешность была минимальной. На рис.10, а и б приведены характеристики соответственно при неправильной и правильной калибровке.
Физически наличие амплитудной погрешности можно объяснить целым рядом факторов:
1) падением напряжения в генераторной обмотке ;
2) уменьшением потока Фq2 вследствие размагничивающего действия магнитного потока реакции генераторной обмотки Фг.р;
3) отклонением потока ротора Ф2 от поперечной оси из-за изменения индуктивного сопротивления рассеяния ротора х2 (поток ротора направлен точно по поперечной оси только тогда, когда индуктивное сопротивление рассеяния ротора x2 = 0;
4) изменением тока возбуждения /в, а следовательно, и магнитного потока Фd1 в результате действия дополнительной э. д. с, наведенной в обмотке возбуждения потоком ротора Ф d2; этот поток создается токами ротора, возникающими в результате пересечения поперечными «волокнами» ротора магнитного потока Фq2 .
Для получения минимальной амплитудной погрешности стараются работать при малых относительных частотах вращения v — уменьшают диапазон рабочих частот вращения.Амплитудная погрешность тахогенератора может быть значительно уменьшена в случае применения определенной по величине активно-емкостной нагрузки (компаундирование).
Выходное напряжение асинхронного тахогенератора UTT не совпадает по фазе с напряжением возбуждения и не остается постоянным по фазе при изменении частоты вращения. Отклонение выходного напряжения UTr по фазе от исходного (соответствующего точке калибровки тахогенератора), измеренное в угловых градусах или минутах, называется фазовой погрешностью тахогенератора ∆ф. Фазовая погрешность в основном определяется индуктивными сопротивлениями ротора и обмоток статора. Величина ее, так же как и величина амплитудной погрешности, может быть значительно снижена за счет правильного выбора характера нагрузки. Фазовую погрешность можно устранить, применив некоторую активно-индуктивную нагрузку, однако, как следует из вышесказанного, при этом возрастет амплитудная погрешность.
Величина фазовой погрешности у современных тахогенераторов высокой точности составляет несколько минут, а у обычных тахогенераторов — несколько градусов.
Следует отметить, что как амплитудная, так и фазовая погрешности меняются с изменением частоты вращения.
Чем больше крутизна выходной характеристики тем больше чувствительность тахогенератора и всей автоматической системы, в которой он работает.Крутизна зависит от величины магнитного потока возбуждения , сопротивления ротора, числа витков генераторной обмотки wT.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.