

















Федеральное агентство по образованию
Государственное образовательное учреждение
высшего профессионального образования
Тульский государственный университет
Кафедра «Робототехники и автоматизации производства»
Курсовая работа
по дисциплине
«Теория автоматического управления»
Вариант 1114.
Выполнил: Кулаков А.В.
гр. 120651
Проверил: к.т.н., доц., Хапкина И.К.
Тула 2008
Оглавление
Задание. 3
Введение. 4
Описание элементного состава и принципа работы привода робота. 5
Анализ сервопривода как объекта управления проектируемого следящего привода. 10
Определяем структуру и параметры регулятора непрерывного следящего привода. 14
Найдём дискретную передаточную функцию корректирующего устройства. 20
Оценим момент трогания спроектированной системы, а также точность и быстродействие при действии возмущений и нелинейных факторов. 23
Список литературы.. 24
1. Привести описание элементного состава и принципа работы привода робота, соответствующего Вашему варианту задания.
2. Провести анализ сервопривода как объекта управления проектируемого следящего привода.
3. Определить структуру и параметры регулятора непрерывного следящего привода робота с заданными элементами усилительно- преобразовательной и силовой части привода по требованиям к его быстродействию и точности.
4. Оценить момент трогания спроектированной системы, а также точность и быстродействие при действии возмущений и нелинейных факторов.
5. Разработать алгоритм работы дискретного корректирующего устройства для микропроцессорной реализации регулятора следящего электропривода.
Целью выполнения курсовой работы по дисциплине «Теория автоматического управления» является закрепление на практике принципов и методов проектирования линейных и нелинейных систем управления, а также методик исследования и проектирования систем регулирования и робототехники.
В процессе выполнения курсовой работы закрепляются теоретические положения, практические умения и навыки по теории управления в процессе решения задачи синтеза конкретной замкнутой системы автоматического управления – привода робототехнической системы. Исходными данными к работе являются математическая модель объекта управления, ее параметры, требования статической и динамической точности и помехозащищенности. Результаты синтеза проверяются моделированием спроектированной системы.
1. В соответствии с вариантом задания (1114) из таблицы вариантов задания получим следующие данные:
|
Код |
Сокращенное Обозначение |
t p, C |
wp, |
d, % |
D, % |
As2 |
ws, |
|
1114 |
УМ1-ЭМП1-ГДДУ-КН3 |
0,02 |
5 |
6 |
5 |
0,1 |
100 |
Запишем математические модели для каждого элемента в соответствии с его порядковым номером и сокращенным обозначением:
1) Безынерционный усилитель – УМ1 – 1000
Uy(t)=Ky*Uкф (1.1)
Ky=1…5;
2) Электромеханический преобразователЭМП1 - _100
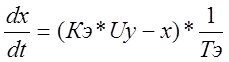 (1.2)
(1.2)
Кэ=0.2…1; Тэ=2*10^-3
3) Гидроцилиндр – золотниковый распределитель
ГДДУ __10
q=К3*x;
E=q-z;
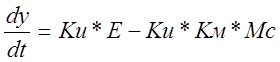 ;
;
 ; (1.3)
; (1.3)
K3=10; Ku=3…6; T=0.02…0.04 c.
x=0.3…0.5; K4=0.1; Kм=0.2..0.6;
Mc=8*10-1;
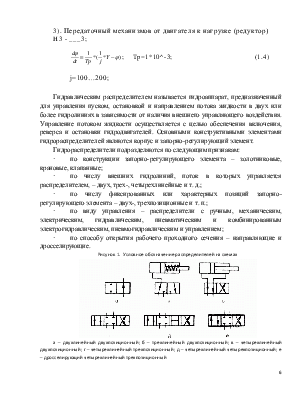
3). Передаточный механизмов от двигателя к нагрузке (редуктор)
H3 - ___3;
 ; Tp=1*10^-3; (1.4)
; Tp=1*10^-3; (1.4)
j=100…200;
Гидравлическим распределителем называется гидроаппарат, предназначенный для управления пуском, остановкой и направлением потока жидкости в двух или более гидролиниях в зависимости от наличия внешнего управляющего воздействия. Управление потоком жидкости осуществляется с целью обеспечения включения, реверса и остановки гидродвигателей. Основными конструктивными элементами гидрораспределителей являются корпус и запорно-регулирующий элемент.
Гидрораспределители подразделяются по следующим признакам:
· по конструкции запорно-регулирующего элемента – золотниковые, крановые, клапанные;
· по числу внешних гидролиний, поток в которых управляется распределителем, – двух, трех-, четырехлинейные и т. д.;
· по числу фиксированных или характерных позиций запорно-регулирующего элемента – двух-, трехпозиционные и т. п.;
· по виду управления – распределители с ручным, механическим, электрическим, гидравлическим, пневматическим и комбинированным электрогидравлическим, пневмогидравлическим и управлением;
· по способу открытия рабочего проходного сечения – направляющие и дросселирующие.
Рисунок 1. Условное обозначение распределителей на схемах
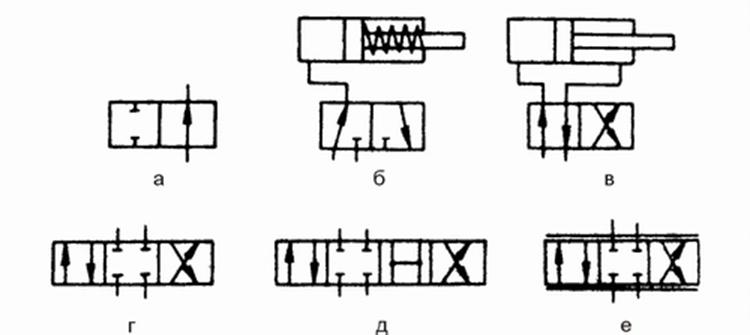
а – двухлинейный двухпозиционный; б – трехлинейный двухпозиционный; в – четырехлинейный двухпозиционный; г – четырехлинейный трехпозиционный; д – четырехлинейный четырехпозиционный; е – дросселирующий четырехлинейный трехпозиционный
Широко применяются в гидроприводах гидрораспределители золотникового типа. Они обладают следующими достоинствами:
· простотой осуществления многопозиционности, т.е. способностью обеспечить все необходимые действия выходного звена гидвигателя одним золотником;
· легкостью управления, что важно в системах с ручным управлением;
· высокой герметичностью;
· компактностью и сравнительной простотой конструкции;
· разгруженностью золотника от статических сил, создаваемых давлением рабочей жидкости.
Недостатки золотниковых распределителей:
· высокие требования к чистоте рабочей жидкости;
· сложность изготовления и ремонта;
· возможность заклинивания;
· возможность облитерации (заращивания) щелей золотников,
· необходимость квалифицированного обслуживания.
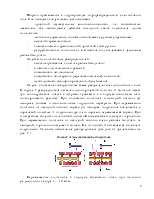
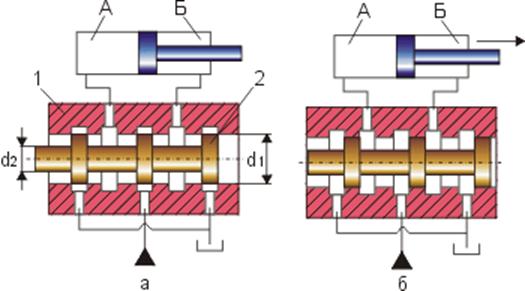
На рис. 2 показана конструктивная схема распределителя золотникового типа. В корпус 1 распределителя вставлен цилиндрический золотник 2. Золотник имеет три цилиндрических пояска с острыми кромками, а в корпусе выполнены пять цилиндрических расточек. При положении золотника в исходной позиции (а) напорная, сливная и исполнительные гидролинии перекрыты. При перемещении золотника из исходной позиции вправо (б) напорная гидролиния соединяется с поршневой полостью А гидроцилиндра и его поршень перемещается вправо. При этом рабочая жидкость из штоковой полости Б вытесняется в сливную гидролинию. При перемещении золотника из исходной позиции влево рабочая жидкость из напорной гидролинии поступает в полость Б, а из полости А вытесняется в сливную гидролинию. Условное обозначение распределителя (см. рис. 2) представлено на рис. 1, г.
Рисунок 2. Схема золотникового распределения
Перемещение золотника в корпусе возможно лишь при наличии радиального зазора 4... 10 мкм.
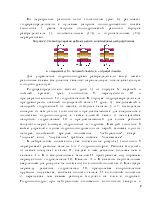
По перекрытию рабочих окон золотником (рис. 3) различают гидрораспределители с нулевым (ширина цилиндрического пояска золотника l равна ширине цилиндрической расточки корпуса распределителя t), положительным (l>t) и отрицательным (l>t) перекрытиями
Рисунок 3. Схема перекрытия рабочих окон в золотниковых распределениях
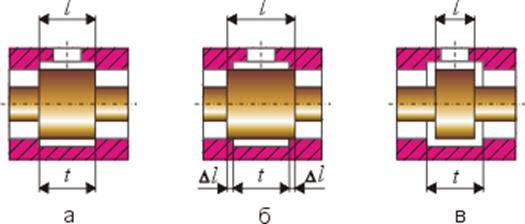
а – наружного; б – положительного; в – отрицательного
Для управления гидроцилиндрами распределители могут иметь различные схемы соединения каналов: параллельную, последовательную и индивидуальную.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.