Гидрораспределитель состоит (рис 4) из корпуса 6, верхней и нижней крышек, трех золотников 8, перепускного 10 и предохранительного 12 гидроклапанов. В корпусе гидрораспределителя предусмотрены главный подводящий канал 11 (рис. 4), соединяемый с напорной гидролинией от насоса, отводные каналы 5 и 7, выходящие попарно от каждого из золотников и предназначенные для соединения с полостями гидроцилиндров, а также сливной канал 2, находящийся напротив гидроклапана 10 и предназначенный для слива рабочей жидкости через сливную гидролинию в гидробак. Каждый золотник 8 может управлять одним гидроцилиндром или их парой, занимая одно из четырех положений: среднее положение - "нейтральное", вверх -"подъем", вниз – "опускание", крайнее нижнее – "плавающее".
В нейтральном положении (как показано на рисунке) золотники 8 перекрывают рабочие каналы 5 и 7 гидроцилиндров. Рабочая жидкость от насоса поступает в канал 11, создает в нем давление, большее чем в каналах А и Б, и соединенном с каналом 11 пространстве под поршнем перепускного гидроклапана 10. Каналы А и Б связаны вертикальным сверлением (на рисунке не показано) со сливной полостью 2. Благодаря перепаду давления гидроклапан 10, преодолевая сопротивление пружины, опускается, сообщая полость канала 11 со сливной полостью 2, перепуская тем самым рабочую жидкость на слив в гидробак. Гидроцилиндры при нейтральном положении золотников заперты и неподвижны. Гидрораспределители, у которых напорная гидролиния является тупиковой при нейтральном положении золотников, называют гидрораспределителями с "закрытым центром". Например, при положении на "подъем" золотник 8 своими поясками открывает доступ жидкости из канала 11 в канал 7, а канал 5 сообщается с полостью 2. Одновременно нижние пояски золотника 8 перекрывают канал А и разобщают его с каналом Б, связанным со сливной полостью 2. При этом жидкость, поступающая под давлением в канал 11, через сверление В в поршне гидроклапана 10 поступает также в пространство под гидроклапаном 10 и канал А. В результате давление в полостях над поршнем гидроклапана 10 и под ним выравнивается и гидроклапан под действием усилия пружины прижимается к седлу и разобщает канал 11 с полостью 2. При "плавающем" положении рабочая жидкость перепускается гидроклапаном 10 на слив, а каналы 5 и 7 поясками золотника сообщены с полостью 2.
Рисунок 4. Гидрораспределитель
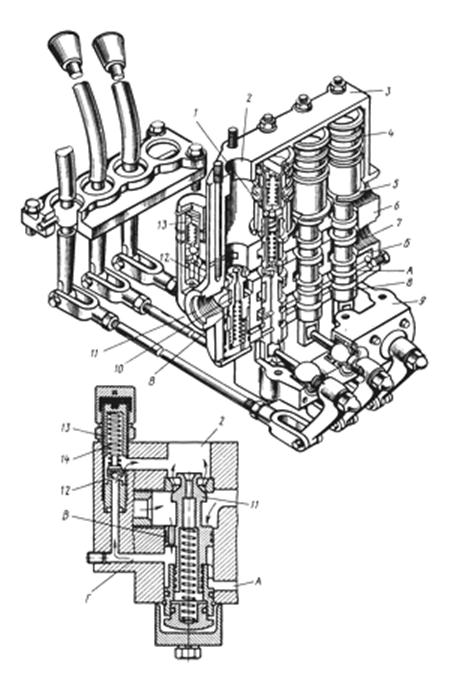
1 – шарик, 2 – полость, 3, 9 – крышки, 4, 14 – пружины, 5, 7, 11 – каналы, 6 – корпус, 8 – золотник, 10, 12 – гидроклапаны, 13 – винт
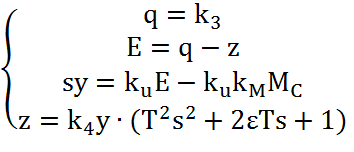
2. В соответствии с элементами построим модель системы.
 |
1.
![]() Сервопривод – устройство, которое
может самостоятельно отслеживать своё перемещение в соответствии с управляющим
воздействием и корректировать свои внутренние параметры. Усилитель, ЭМП,
гидроцилиндр и редуктор представляют собой объект управления. В следящем
приводе используется принцип управления с отрицательной О.С. В большинстве случаев,
благодаря использованию сервоприводов достигаются наилучшие характеристики
систем автоматизации, и, не редко их применение является единственно
приемлемым. Современный сервопривод способен управлять скоростью, моментом и
положением. Принцип его действия подразумевает возможность решения задачи
стабилизации и собственно задачи слежения. Эти характеристики определяют сервоприводы
как наиболее приоритетные на тех объектах, где предъявляются высокие требования
к динамике и точности работы электромеханических систем. На привод действуют возмущающее
воздействие в виде гармонического сигнала и постоянная составляющая, являющаяся
результатом трения в двигателе и постоянной составляющей нагрузки.
Сервопривод – устройство, которое
может самостоятельно отслеживать своё перемещение в соответствии с управляющим
воздействием и корректировать свои внутренние параметры. Усилитель, ЭМП,
гидроцилиндр и редуктор представляют собой объект управления. В следящем
приводе используется принцип управления с отрицательной О.С. В большинстве случаев,
благодаря использованию сервоприводов достигаются наилучшие характеристики
систем автоматизации, и, не редко их применение является единственно
приемлемым. Современный сервопривод способен управлять скоростью, моментом и
положением. Принцип его действия подразумевает возможность решения задачи
стабилизации и собственно задачи слежения. Эти характеристики определяют сервоприводы
как наиболее приоритетные на тех объектах, где предъявляются высокие требования
к динамике и точности работы электромеханических систем. На привод действуют возмущающее
воздействие в виде гармонического сигнала и постоянная составляющая, являющаяся
результатом трения в двигателе и постоянной составляющей нагрузки.
f(t)

2. Получим передаточные функции всех элементов системы.
1). Для уравнения 1.1.
Зададимся Ку=2. Общий вид передаточной функции:
 |
Uкф Uy
Uкф – входной сигнал(напряжение)
Uy – выходной сигнал(напряжение)
Уравнение 1.1 соответствует усилительному звену. Его передаточная функция имеет следующий вид:
 (2.1)
(2.1)
2) Для уравнения 1.2.
Uy – входной сигнал
x – выходной сигнал
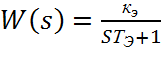 (2.2)
(2.2)
3) Для уравнения 1.3.
x – входной сигнал
y – выходной сигнал
Проведем
замену:  . Получим:
. Получим:
 (2.3)
(2.3)
Пусть a=![]() , c1=
, c1=![]() E-a ,a=
E-a ,a= ![]() E- c1 ,тогда
E- c1 ,тогда  ,
,
z= ,
,
![]() =
= .
.
Получим передаточные функции для уравнений системы, содержащих дифференцирование:
![]() (2.4)
(2.4)
 , (2.5)
, (2.5)
 (2.6)
(2.6)
4) Для уравнения 1.4.
y – входной сигнал
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.