φ – выходной сигнал
 (2.7)
(2.7)
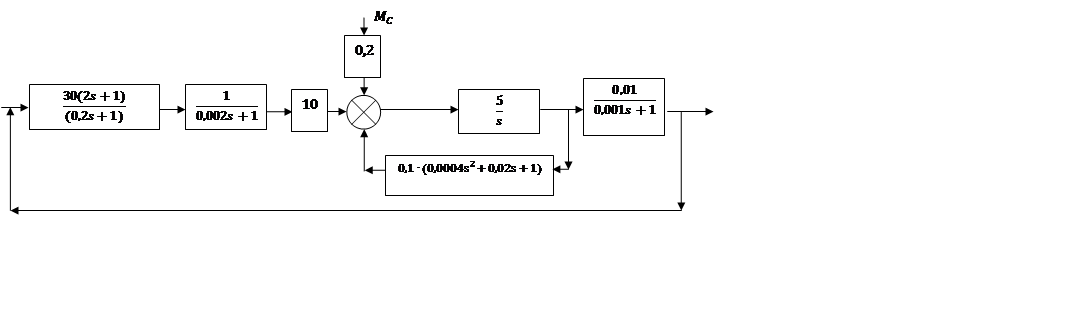
3. На основании полученных передаточных функций элементов системы и принятых допущениях о значениях постоянных получим разомкнутую передаточную функцию системы управления.

![]()
|
![]()
|
|
|
|
|
|
 Uкф Uy E х q
Uкф Uy E х q
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() -
-
![]()
 |
Примем:
 ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
j=100,
,
j=100,
Получим:
 |
|
|
|
|
 |
|||||||||
 |
|||||||||
![]() -
-
 |
4. Получим ЛАЧХ неизменяемой части.
Получим эквивалентную передаточную функцию системы. Для этого воспользуемся правилами последовательного и встречно параллельного соединения.
 ,
,
 |

ПФ
содержит четыре звена.
Рассчитаем
значение ![]() , где k –
коэффициент при числителе, определяющий точку начала ЛАЧХ на оси ординат.
, где k –
коэффициент при числителе, определяющий точку начала ЛАЧХ на оси ординат.
k=1;
![]() (5.1)
(5.1)
Для построения ЛАЧХ запишем наклон и частоты сопряжения для каждого звена:
1. Апериодическое звено  .
Имеет наклон
.
Имеет наклон 
![]()
![]() (5.2)
(5.2)
2. Апериодическое звено , имеет наклон
, имеет наклон
![]()
![]() 2,6 (5.3)
2,6 (5.3)
3. Апериодическое звено  , имеет наклон
, имеет наклон
![]()
![]() (5.4)
(5.4)
4. Апериодическое звено  , имеет наклон
, имеет наклон
![]()
 (5.5)
(5.5)
![]()
Т.к. ЛАЧХ берет своё начало ниже оси абсцисс, определить частоту среза нельзя.
1. При построении желаемой ЛАЧХ и нахождении ПКУ, будем исходить из требований к системе:
tp=0.02 c,
Δ=5%,
δ=6%
ωр=5 ![]()
Параметр системы по которому будем проводить расчет корректирующего устройства – φ. Для данного привода он соответствует перемещению манипулятора.
1. Определим частоту среза желаемой ЛАЧХ:
Из условия:

![]()
Отсюда:
 (6.2)
(6.2)
2. Определим области НЧ, СЧ, И ВЧ.
В СЧ области наклон
асимптоты должен составлять , для обеспечения равенства нулю
статической ошибки.
Т.к область СЧ
составляет ![]() от значения частоты среза, то
соответственно нижняя область СЧ будет составлять:
от значения частоты среза, то
соответственно нижняя область СЧ будет составлять:
 (6.3)
(6.3)
Верхняя область СЧ будет иметь значение:
 (6.4)
(6.4)
3. Определение коэффициента усиления корректирующего устройства.
 , откуда
, откуда ![]() (6.5)
(6.5)
Примем ![]()
Рассчитаем коэффициент усиления корректирующего устройства:
 (6.6)
(6.6)
4. Lp=20lgAp>20lg(![]() ) , Lp>20lg(
) , Lp>20lg( )=24,4.
)=24,4.
Кроме того  , откуда
при ωр=5 также Lp=24,4.
, откуда
при ωр=5 также Lp=24,4.
То есть при ωр=5 для δ=6% желаемая ЛАЧХ должна находится выше 24,4 dB,
5. На основании пунктов 1-4 построим желаемую ЛАЧХ.
Для этого введём два дополнительных звена (ПКУ).
1). Форсирующее звено:
![]()
![]() , Т=2. Звено поднимает располагаемую
ЛАЧХ на
, Т=2. Звено поднимает располагаемую
ЛАЧХ на  . Итоговый наклон ЛАЧХ становится
. Итоговый наклон ЛАЧХ становится 
2). Апериодическое звено:
![]() , Т=0,02. Звено опускает
располагаемую ЛАЧХ на . Итоговый наклон ЛАЧХ благодаря
этому звену становится
, Т=0,02. Звено опускает
располагаемую ЛАЧХ на . Итоговый наклон ЛАЧХ благодаря
этому звену становится .
.
Таким образом на всей
СЧ области наклон желаемой ЛАЧХ составляет .
6. На основании пункта 5 получим передаточную функцию последовательного корректирующего устройства.
 (6.7)
(6.7)
7. Построим структурную схему системы с ПКУ, проведя единичную обратную связь по φ.
Переходный процесс в данной системе представлен на рисунке 5.
По графику оценим время регулирования:
Рисунок 5. Переходный процесс.
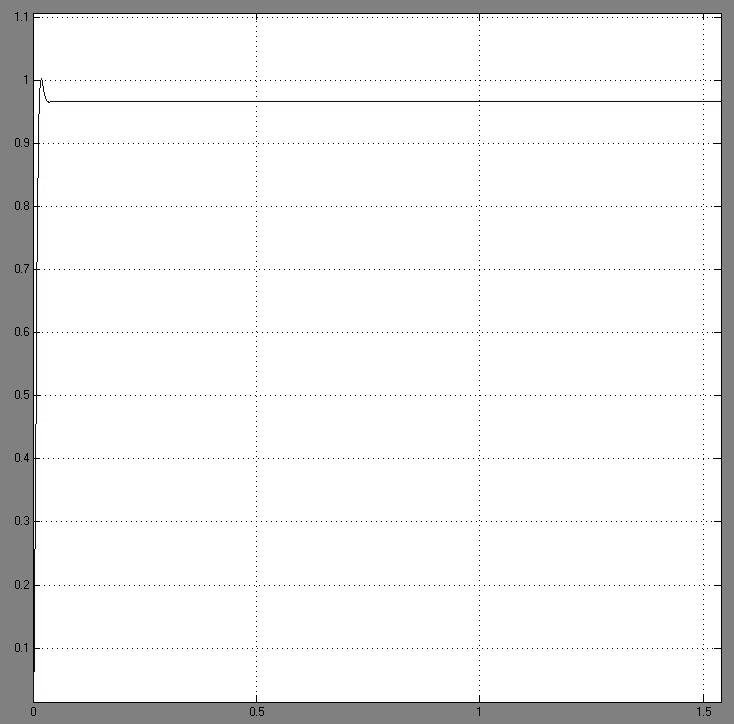
tp=0.02 с (7.1)
Т.о время регулирования соответствует поставленным в ТЗ требованиям.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.



