БАЛАКОВСКИЙ ИНСТИТУТ ТЕХНИКИ, ТЕХНОЛОГИИ И УПРАВЛЕНИЯ
ФАКУЛЬТЕТ ИНЖЕНЕРНО-СТРОИТЕЛЬНЫЙ
КАФЕДРА УПРАВЛЕНИЯ И ИНФОРМАТИКИ В ТЕХНИЧЕСКИХ СИСТЕМАХ
ЛАБОРАТОРНАЯ РАБОТА №3
по дисциплине
Теория автоматического управления
СИНТЕЗ ЛИНЕЙНЫХ ИМПУЛЬСНЫХ СИСТЕМ МОДАЛЬНЫМ МЕТОДОМ
Выполнил ст. гр. УИТ-41
Печавин А. В.
Проверил преподаватель
Мартынова И. В. _______
«___» ___________2005
2005
Цель работы: Исследовать возможности модального метода синтеза цифровых регуляторов для линейных импульсных систем.
Исходные данные:
Исходная передаточная функция:
Шаг дискретизации T=0.2
Желаемые корни: λ1=0,05; λ2=0,2; λ3=0
1. Выполнение расчета дискретной передаточной функции по заданной непрерывной функции
Найдем дискретную передаточную функцию используя матричный метод.
По заданной передаточной функции запишем дифференциальное уравнение:
y” + 0,5y’ + 1,5y = u
Перейдем к уравнениям в пространстве состояний
y = x1
y’ = x’1 = x2 x’2 + 0,5x2 + 1,5x1 = u
y” = x’2
![]() x’1 = x2
x’1 = x2
x’2 = -1,5x1 – 0,5х2 + u
y = x1

![]() =>
X’ =
=>
X’ =
Y = (1 0)x
Следовательно, матрицы:
![]()

![]()
![]() =
; = ; = (1 0)
=
; = ; = (1 0)
По формуле (4) определим матрицы А и В


![]() + 0,2 + 2· =
+ 0,2 + 2· =

![]()
Матрицы С и совпадают.
Разностные уравнения имеют вид:
![]() X’(k+1)
= x(k) + u(k)
X’(k+1)
= x(k) + u(k)
Y(k) = (1 0)x(k)
Дискретную передаточную функцию с фиксатором нулевого порядка находим по формуле:
W(z) = C{ZI-A}-1B
{zI – A}-1 = =
W(z) = (1 0) =
2. Для объекта, математическая модель которого задана передаточной функцией:
выполнить синтез астатического регулятора модальным методом по формулам:
 ,
,  , где D(z)=d1z + d0. Желаемые корни соответствуют
минимальной длительности процессов в замкнутой системе.
, где D(z)=d1z + d0. Желаемые корни соответствуют
минимальной длительности процессов в замкнутой системе.
Характеристическое уравнение замкнутой синтезированной импульсной системы имеет вид: С(z) = (z-λ1)(z-λ2)(z-λ3) = z3 - 0,25z2 + 0,01z
Кроме того: (z-1)[z2 - 1.85z + 0.903 + d1z + d0] + k(0.01925z + 0.01895) = 0
![]() Получим систему:
Получим систему:
d1 – 2.85 = 0
d0 + 2.753 + 0.01925k – d1 = 0
-0.903 – d0 + 0.01895k = 0
Решая систему, получим значения коэффициентов:
d1 = 2.85; d0 = -0.407; k = 26.178.
Т.о. выражения корректора статики и динамики:
 ;
; 
3. На рисунке 1 изображена замкнутая дискретная система без регулятора и с регулятором. Переходные процессы обоих систем представлены на рисунке 2.
Переходный процесс с регулятором на звеньях задержки совпадает с моделью регулятора в общем виде, что подтверждает правильность построения модели на звеньях задержки.
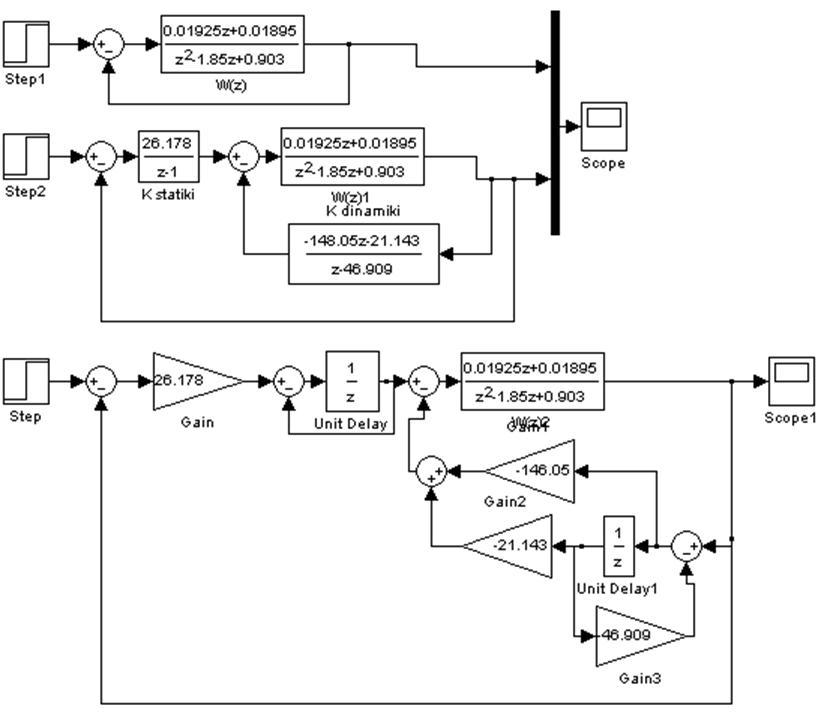
Рисунок 1 – Модели дискретных систем без регулятора и с регулятором,
и дискретной системы в звеньях задержки
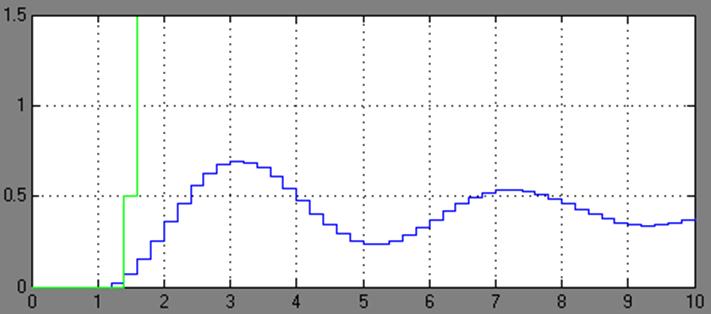
Рисунок 3 – Модель дискретной системы в звеньях задержки
Вывод: Рассмотрев все характеристики звеньев (с регулятором и без него), можно говорить о резком ухудшении характеристик системы, ввиду того, что переходный процесс системы с регулятором носит явно неустойчивый характер. Такое поведение может говорить о неправильности коэффициентов корректоров или невозможности подбора оных. Кроме того, время реакция системы увеличилось, что является также негативным фактором. Таким образом, в ходе выполнения лабораторной работы была получен регулятор с неудовлетворительными характеристиками.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.