Принцип действия заданной САР заключается в следующем: при изменении значения регулируемого параметра на выходе измерительного элемента, пропорционально величине контролируемого параметра изменяется аналоговый сигнал, поступает на вход сравнивающего элемента. СЭ выполняет сравнение заданного значения регулируемого параметра, представленного в аналоговой форме, с сигналом, поступающим из ИЭ. В случае рассогласования этих сигналов СЭ формирует на выходе сигнал отклонения, который поступает на вход АЦП, где преобразуется в дискретную форму. Далее сигнал поступает на вход ВУ, где преобразуется в соответствии с П - законом регулирования, запрограммированного в вычислительном устройстве в дискретный сигнал определённой частоты. Далее производиться широтно-импульсная модуляция этого сигнала с помощью цифро-аналогового преобразователя, в результате чего образуется сигнал в виде последовательности прямоугольных импульсов с постоянной амплитудой, периодом и переменной шириной и скважностью импульса, пропорциональной значению входного сигнала. Эти импульсы подаются на вход исполнительного двигателя, ротор которого с приходом каждого последующего импульса поворачивается на определённый угол. Величина угла поворота ротора зависит от длительности импульса. Скорость вращения ротора ИД уменьшается за счёт редуктора. Вращение ведомого вала редуктора приводит к закрытию или открытию клапана, выступающего в роли регулирующего органа, тем самым изменяя значение регулируемого параметра до тех пор, пока он не станет равным заданному значению Хвх(t). Аналоговый сигнал из ИЭ поступает на СЭ, где преобразовывается в аналоговый сигнал рассогласования и далее на АЦП. Принцип управления – по отклонению.
3 Графики сигналов в дискретной части САР
Дискретная часть САР состоит из последовательно соединенных сравнивающего устройства, АЦП, вычислительного устройства и ЦАП. Рассмотрим графики изменения сигналов на входе и выходе каждого из этих элементов (рисунок 3.1).
Сигнал на входе АЦП представляет собой непрерывный сигнал рассогласования х1(t) в виде ступенчатого воздействия. На выходе АЦП выдает цифровой сигнал х2(t). При этом происходит квантование по времени, то есть осуществляется выборка непрерывного сигнала в дискретные моменты времени t = nT, где n = 0, 1, 2, 3… ( Т – интервал дискретизации, в данном случае Т=1.2).
Поскольку АЦП представляется в виде идеального ключа способного мгновенно размыкаться и замыкаться, то на его выходе будет формироваться последовательность мгновенных равноотстоящих импульсов типа δ-функций, амплитуда которых будет пропорциональна величине непрерывного сигнала в момент замыкания ключа.
Сигнал
из АЦП идет на вход ВУ, которое реализует П-закон регулирования (Приложение Г).
ВУ включает в себя звено запаздывания с передаточной функцией e-TS,
учитывающего время ![]() прохождения сигнала через
цифровой фильтр, поэтому график сигнала х3(t) на выходе из
ВУ имеет запаздывание
прохождения сигнала через
цифровой фильтр, поэтому график сигнала х3(t) на выходе из
ВУ имеет запаздывание
Выходной сигнал из вычислительного устройства х3(t) модулируется цифро-аналоговым преобразователем. В данном случае применяется широтно-импульсная модуляция, поэтому прямоугольные импульсы на выходе ЦАП будут иметь постоянную амплитуду, период дискретизации, длительность и скважность.
Сигнал из ЦАП идет на вход усилителя, который пропорционально его увеличивает х5(t)= 123х4(t). Графики сигналов в дискретной части САУ при ступенчатом воздействии показаны на рисунке 3.1.
Рисунок 3.1 - Графики сигналов в дискретной части САР
4 Определение диапазона частот входного в дискретную часть САР непрерывного сигнала
На входе в дискретную часть САР стоит аналого-цифровой преобразователь, который осуществляет дискретизацию непрерывного сигнала. В соответствии с теоремой Котельникова-Шеннона, согласно которой всякий непрерывный сигнал, имеющий ограниченный частотный спектр, полностью определяется своими дискретными значениями в моменты времени:
В общем случае любой аналоговый сигнал имеет
бесконечный спектр, но он характеризуется активной шириной от нуля верхней границы
частотного спектра![]() в котором заключено 90%
содержания энергии. Поэтому частоту дискретизации по времени принимают в 1.5 –
2.5 раза больше значения, рассчитанного по теореме Котельникова, то есть
в котором заключено 90%
содержания энергии. Поэтому частоту дискретизации по времени принимают в 1.5 –
2.5 раза больше значения, рассчитанного по теореме Котельникова, то есть
Отсюда определяем диапазон частот входного в дискретную часть системы непрерывного сигнала
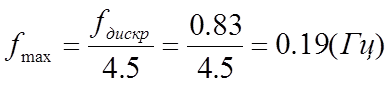
Диапазон частот входного в дискретную часть системы непрерывного сигнала заключается в пределах от 0 до 0.19 Гц. В случае выхода частоты входного непрерывного сигнала за границы данного диапазона дискретная система автоматического регулирования будет работать с потерей информации.
5 Разработка структурных схем с ПФ замкнутой и разомкнутой ДСАР
Для всех элементов, составляющих систему, запишем дифференциальные уравнения, и найдем передаточные функции элементов. Затем представим каждое уравнение в виде простой структуры и согласуем входные и выходные величины этих структур:
1) Сравнивающий элемент (СЭ)
Уравнение:
![]()
Передаточная функция:
![]()
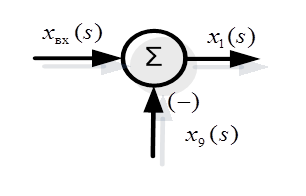
Рисунок 5.1 – Элементарная структура СЭ
2) Объект регулирования (ОР)
Уравнение:
Передаточная функция:
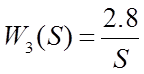
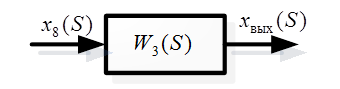
Рисунок 5.2 - Элементарная структура ОУ
3) Измерительный элемент (ИЭ)
Уравнение:
![]()
Передаточная функция:
![]()
Рисунок 5.3 - Элементарная структура ИЭ
4) Усилитель (У)
Уравнения:
![]()
Передаточная функция:
![]()
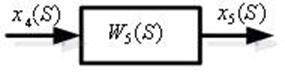
Рисунок 5.4 - Элементарная структура У
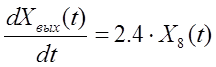
5) Исполнительный двигатель (ИД)
Уравнение:
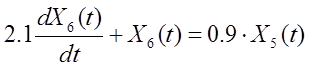
Передаточная функция:
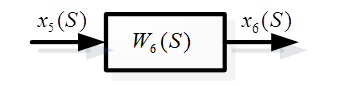
Рисунок 5.5 - Элементарная структура ИД
6) Редуктор (Р)
Уравнение:
![]()
Передаточная функция:
![]()
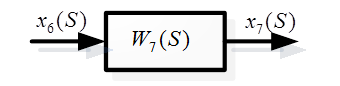
Рисунок 5.6 - Элементарная структура Р
7) Регулирующий орган (РО)
Уравнение:
![]()
Передаточная функция:
Рисунок 5.7 - Элементарная структура РО
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.