Если ![]() то
то
![]() называется частотой
среза. При
называется частотой
среза. При ![]() =0,01
определяют
=0,01
определяют ![]() как
1% частоту среза.
как
1% частоту среза.
Определение: Пусть r скалярный процесс со
спектральной плотностью энергии ![]() . Полоса частот
. Полоса частот ![]() определяется как
определяется как ![]() и
содержит заданную часть
и
содержит заданную часть ![]() половины энергии процесса
половины энергии процесса  .
.
Если ![]() , то говорят об 1% частоте среза, что
означает содержание в интервале
, то говорят об 1% частоте среза, что
означает содержание в интервале ![]() 99% от половины энергии процесса.
99% от половины энергии процесса.
 |
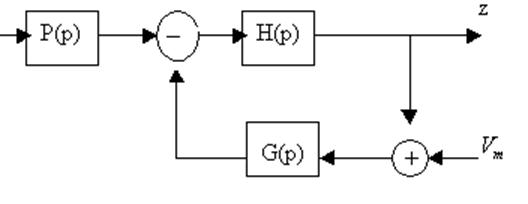
Рассмотрим 
Для получения малого ![]() нужно иметь
нужно иметь ![]() в полосе частот
эталонной переменной.
в полосе частот
эталонной переменной.
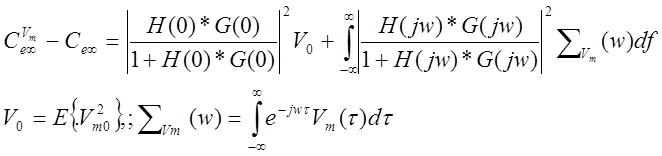
Следцет отметить что это не означает что ![]() малая величина,
т.к. этот член определяет постоянную часть эталонной переменной, т.е от
заданной рабочей точки во входной переменной. Второй член важен для
динамического диапазона входной переменной и поскольку этот диапазон ограничен,
то входная величина должна быть ограничена тоже.
малая величина,
т.к. этот член определяет постоянную часть эталонной переменной, т.е от
заданной рабочей точки во входной переменной. Второй член важен для
динамического диапазона входной переменной и поскольку этот диапазон ограничен,
то входная величина должна быть ограничена тоже.
Однако принципы проектирования ![]() и
и ![]() - противоречивы. Систему можно
спроектировать так, чтобы удовлетворялся один из принципов.
- противоречивы. Систему можно
спроектировать так, чтобы удовлетворялся один из принципов.
![]()
Выберем ![]() :
:
Если ![]() при
при
![]() то это означает,
что
то это означает,
что ![]() при
при
![]() должно
увеличиваться, а это означает, что
должно
увеличиваться, а это означает, что ![]() остается большим в частотном
диапазоне входного сигнала
остается большим в частотном
диапазоне входного сигнала ![]() . Это приводит к перегрузке системы.
. Это приводит к перегрузке системы.
Задача синтеза регулятора, основаная на частотных методах.
Порядок решения:
1. Составляют математическое описание объекта.
2. Выбирают регулирующий орган и силовой привод, усилитель и датчики.
3. Составляют передаточные функции и строят ЛАФЧХ и ФЧХ.
4. По заданным требованиям на частотные характеристики строят желаемые частотные характеристики ЛАФЧХ и ФЧХ.
5. По построенным желаемым и действительным частотным характеристикам определяют тип и место введения корректирующих устройств.
Корректирующие устройства бывают последовательные, параллельные и комбинированные.
Последовательные корректирующие устройства достаточно просты, но их
включение всегда приводит к увеличению частоты среза и следовательно полосы
пропускания системы при ![]() , т.е. когда
, т.е. когда ![]() .
.
При этом приходится применять более быстодействующие приводы и большим потреблением мощности.
Параллельные корректирующие устройства более сложные, но они сужают полосу пропускания.
В сложных системах применяют как пораллельные, так и последовательные методы.
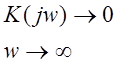
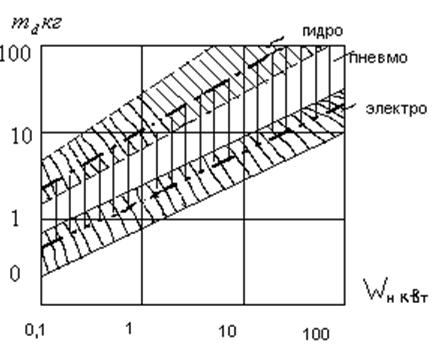
Выбор характеристик двигателя.
Зависимость массы и номинальной выходной мощности.
Выбор механической передачи ![]()
![]() -момент
инерции ротора
-момент
инерции ротора
![]() момент
инерции якоря двигателя
момент
инерции якоря двигателя
 |
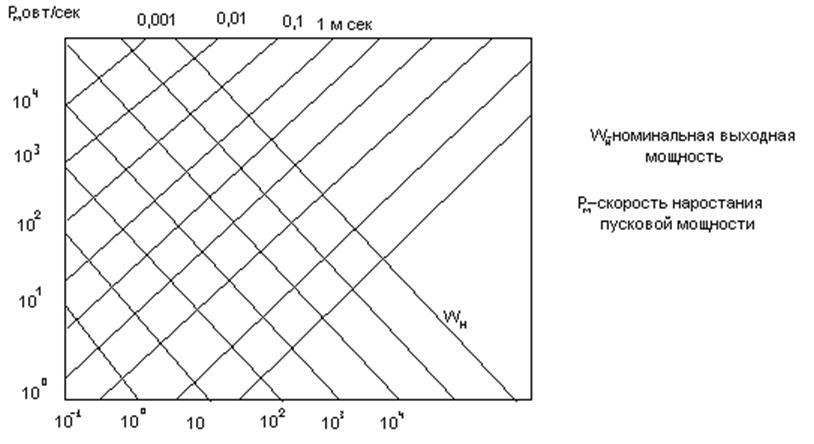
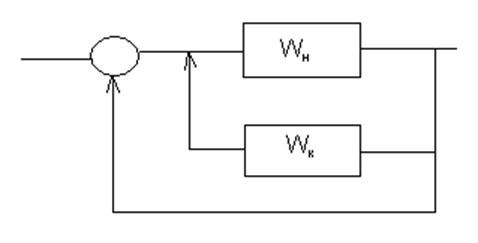
Синтез последовательных и параллельных корректирующих устройств.
![]()
 |
![]()
![]()
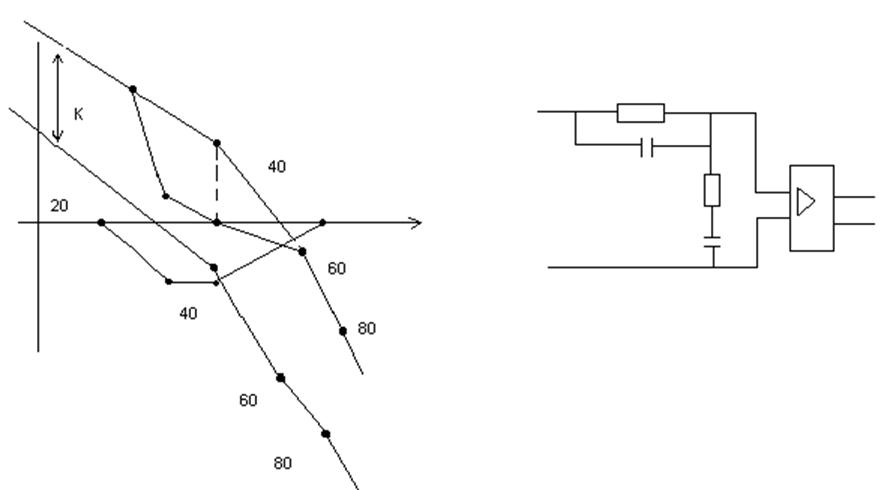 |
Синтез параллельного устройства
![]()
![]()
 |
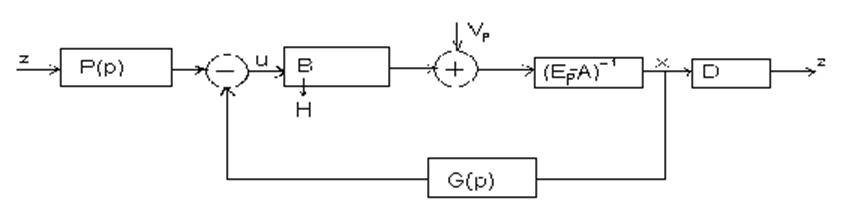
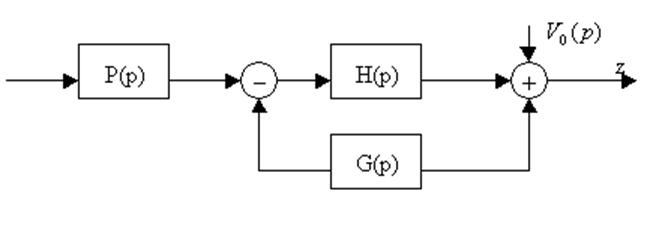
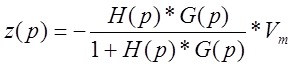
Возмущения, действующие на систему ухудшают показатели качества регулирования.
Исследуем зависимость возрастания квадрата ошибки слежения и квадрата входной переменной за счет действия возмущений и сформулируем принципы проектирования.
Примем допущения:
1.
![]() -процесс
не корректированный с
-процесс
не корректированный с ![]() и
и ![]() .
.
2.
Управляемая переменная является наблядаемой ![]() ,
, ![]() .
.
3. Система управления является ассимптотически устойчивой.
4.
Входная и управляемая переменная является скалярными и ![]() и
и ![]() .
.
5.
 |
 :
: 
![]()
![]()
![]()
![]() –
неособая матрица.
–
неособая матрица.
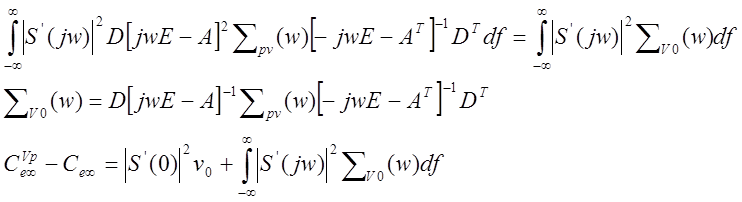
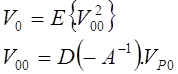
Составляющая от постоянной части возмущений в установившемся среднем
значении квадрата ошибки слежения :  ,
, ![]() , где
, где ![]() - момент второго порядка от
- момент второго порядка от ![]() .
.
Составляющая от переменной части возмущений :
![]() -
среднее значение квадрата ошибки слежения с возмущением.
-
среднее значение квадрата ошибки слежения с возмущением.
![]() -
среднее значение квадрата ошибки слежения без возмущения.
-
среднее значение квадрата ошибки слежения без возмущения.
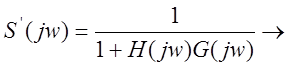
Уменьшение прироста ![]() от возмущения
от возмущения ![]() в асимптотически
устойчивой линейной системе достигается за счет малости абсолютного значения
функции чувствительности
в асимптотически
устойчивой линейной системе достигается за счет малости абсолютного значения
функции чувствительности
![]() в
полосе частот возмущения.
в
полосе частот возмущения.
 |
 малое
значение
малое
значение
![]() -
большое значение, что противоречит условиям устойчивости.
-
большое значение, что противоречит условиям устойчивости.
Среднее значение квадрата входной переменной :
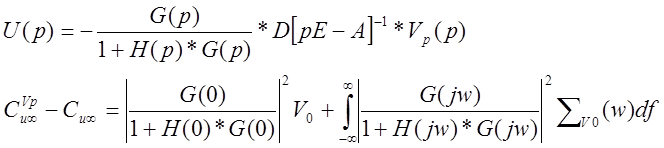
Чтобы получить малое увеличение ![]() необходимо малое значение
необходимо малое значение 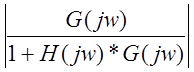 в диапазоне
частот эквивалентного возмущения.
в диапазоне
частот эквивалентного возмущения.
 |
Чтобы уменьшить прирост установившегося среднего значения квадрата ошибки
слежения от шума наблюдения в асимптотически устойчивой системе необходимо
иметь малой величины  в
полосе частот шума наблюдения.
в
полосе частот шума наблюдения.

автоматического управления
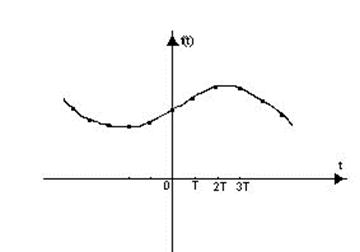
Решетчатые функции:
n – целое число
Т – постоянная (период дискретности)
![]()
Введем время ![]()
Смещенная решетчатая функция.
При фиксированном ![]()
Смещенная решетчатая функция удовлетворяет условию: ![]() .
.
Если имеем разрыв первого рода в точке ![]() , то
, то
![]()
![]()
В этом случае ![]() ,
т.е.
,
т.е. ![]() .
.
![]() функция
двух аргументов.
функция
двух аргументов.
![]() - конечная разность первого
порядка
- конечная разность первого
порядка

![]() -
разность порядка
-
разность порядка ![]() .
.

Примеры:
1. ![]()
![]()
2. ![]()
![]()
![]()
3. ![]()
![]()
![]()
![]()
4. ![]()
![]()
![]()
![]()

Пусть ![]() -
решетчатая функция.
-
решетчатая функция.
Найти ![]() для
которой
для
которой ![]() является
первой разностью.
является
первой разностью.
 первообразная
функция.
первообразная
функция.

Если решетчатая функция определена при всех целочисленных значениях
аргумента n=±0,
±1, ±2…,
то  ряд, который
должен сходиться.
ряд, который
должен сходиться.
Если ![]() первообразная
для
первообразная
для ![]() ,
то
,
то ![]() также является
первообразной для
также является
первообразной для ![]() действительно
действительно
![]() .
.
Общий вид первообразной : .
.
Значение c можно выразить через значение
первообразной при каком-то фиксированном n=N,  или
или  .
.
Если положить n=N+l :  , l=[1,2,…]
, l=[1,2,…]
или при N=0 :  .
.
Для решетчатых функций справедлива формула суммирования по частям :

 - формула суммирования по
частям
- формула суммирования по
частям
Пример: ![]()
![]() n=[0,1…]
n=[0,1…]
 ;
;
Разностные уравнения.
![]()
Разностное уравнение связывает n-решетчатую
функцию ![]() и
разности до некоторого порядка или
и
разности до некоторого порядка или ![]()
Например:
![]()

Если исходное уравнение содержит в явном виде ![]() и
и ![]() ,
то исходное уравнение называется разностным порядка к.
,
то исходное уравнение называется разностным порядка к.
Решетная функция ![]() , обращающая разностные уравнение в
тождество называется его решением.
, обращающая разностные уравнение в
тождество называется его решением.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.