Назначение обработчиков исключительного состояния производится через контекстуальное меню Simulink, вызываемое при щелчке правой кнопкой по выбранному блоку. Например, для назначения блоку выключателя на схеме модели файла op.m, после нажатия правой кнопки мыши выбирается: block Propities – Callbacks – OpenFn – и в окно «Content for callback Open Fn» вводится текст k1=op(s_Q1,s_KP). Здесь первый параметр функции op содержит диспетчерское наименование коммутационного аппарата, второй – название контролируемого пункта, а возвращаемое значение (номер выбранного пункта меню) присваивается переменно k1.
![]() Изображение
номера состояние на графическом обозначении выключателя получено путем
маскирования блока и записи на вкладке Icon в окне «Drawing commands» команды отображения значения соответствующей
переменной (в нашем случае disp(NUQ11) ). Вызов вкладки производится при щелчке
правой кнопкой мыши по объекту и выборе пункта контекстуального меню Edit Mask.
Изображение
номера состояние на графическом обозначении выключателя получено путем
маскирования блока и записи на вкладке Icon в окне «Drawing commands» команды отображения значения соответствующей
переменной (в нашем случае disp(NUQ11) ). Вызов вкладки производится при щелчке
правой кнопкой мыши по объекту и выборе пункта контекстуального меню Edit Mask.
Схема обработки, выполняемая в блоке _KP_2, приведена на рис. 58
Полученные от блока ECH_C данные через входной порт D поступают на блоки обработки данных соответствующих выключателей (Q1, Q2). По синхронизирующему сигналу Clk производится определение бита нового состояния New и значение состояния, в которое требуется перевести выключатель (Sost). Значение состояния запоминается в переменной рабочей области (для каждого выключателя своя переменная). В случае, если требуется смена состояния выключателя, то подается разрешающий сигнал на подсистему QQ1 или QQ2 и через выходные порты Out1 и Sost активированной подсистемы выдаются значения номера объекта и требуемого состояния выключателя. Часть данных мультиплексируется и
Рис. 58. Схема определения состояния контролируемого пункта с двумя выключателями выдается на порт Ob, часть обрабатывается логической схемой L1 и выдается на выходной порт Sost. Результирующий сигнал, несущий сведения о необходимости изменения состояния одного из выключателей, выставляется на порт Izm.
Схема работы блоков Q1 и Q2 (рис.58) дана на рис.59. Получаемый через порт D номер выбранного диспетчером пункта меню проверяется следующим образом. Если выбрана операция CANCEL (D=3), то работа внутренних генераторов одиночных импульсов блокируется и схема выдает на выходные порты неизменные состояния триггеров, контролирующих состояние выключателя. При выборе активной операции (включить или отключить) производится сравнение требуемого состояния (Q1_) с текущим (NUQ1) и при различии возбуждается триггер Q1_new.
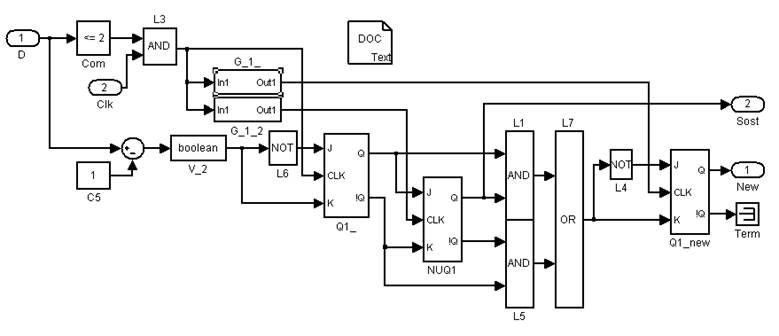
Рис. 59. Схема определения изменения состояния выключателя
Очередность опроса триггеров контролируется внутренними генераторами G_1_ и G_1_2. Требуемое состояние выключателя выставляется на порт Sost, а бит обновления - на порт New.
На рис. 60 показана схема определения номеров выбранного объекта и контролируемого пункта (блоки KP_2 и KP_3 рис.54).
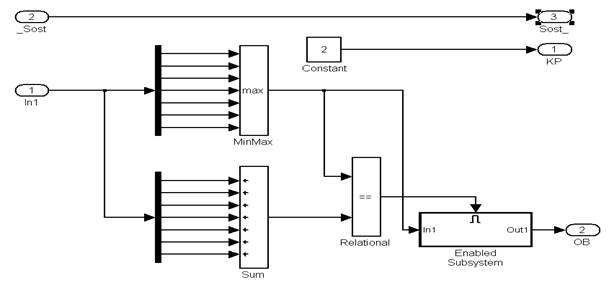
Рис. 60. Схема определения номеров выбранного объекта и контролируемого пункта
Схема базируется на предположении, что диспетчер может выдать за одну операцию только одну активную команду для исполнения. И только по завершении всех этапов текущей команды (включая получения квитанции от управляемой стороны) может выдаваться следующая команда.
![]() Через
порт _Sost поступает сигнал о требуемом состоянии
выключателя и без обработки передается на выходной порт Sost_.
Вектор номеров объектов поступает через входной порт In1.
При корректной работе (активирована только одна команда) блоки MinMax и Sum выдают одинаковые
значения, которые проверяются блоком Relation и через
управляемую подсистему Enable Subsystem на порт OB выдается номер
объекта. При некорректной работе оператора на порт OB
поступает значение 0. Номер контролируемого пункта выставляются на порт KP.
Через
порт _Sost поступает сигнал о требуемом состоянии
выключателя и без обработки передается на выходной порт Sost_.
Вектор номеров объектов поступает через входной порт In1.
При корректной работе (активирована только одна команда) блоки MinMax и Sum выдают одинаковые
значения, которые проверяются блоком Relation и через
управляемую подсистему Enable Subsystem на порт OB выдается номер
объекта. При некорректной работе оператора на порт OB
поступает значение 0. Номер контролируемого пункта выставляются на порт KP.
Вторичная функция пользователя. Вторичная функция исполняется на вторичной станции (на контролируемом пункте). На рис.61 дана модель функции телеуправления. Задача функции проверить возможность исполнения приказа и сформировать команду на его выполнение. Например, на включение или отключение выключателя какого-либо присоединения.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.