![]() Первичная
функция пользователя. Рассматривается процесс телеуправления. Этот процесс
инициируется передающей станцией. Первичная функция этого процесса взаимодействует
с оператором (энергодиспетчером) и прикладным уровнем передающей станции.
Энергодиспетчер указывает объект на одном из контролируемых пунктов, и выбирает
для него операцию, например, включить. Первичная функция процесса пользователя
выбирает требуемые параметры и передает запрос на обслуживание прикладному
уровню первичной станции через порт F(req)
(см. рис. 54). Прикладной уровень выставляет сигнал готовности принять данные и
квитанцию от вторичной функции пользовательского процесса. Квитанция поступает
на входной порт CON, а сигнал готовности на порт E_OUT первичной
функции. Модель первичной функции процесса пользователя для телеуправления
представлена на рис. 55.
Первичная
функция пользователя. Рассматривается процесс телеуправления. Этот процесс
инициируется передающей станцией. Первичная функция этого процесса взаимодействует
с оператором (энергодиспетчером) и прикладным уровнем передающей станции.
Энергодиспетчер указывает объект на одном из контролируемых пунктов, и выбирает
для него операцию, например, включить. Первичная функция процесса пользователя
выбирает требуемые параметры и передает запрос на обслуживание прикладному
уровню первичной станции через порт F(req)
(см. рис. 54). Прикладной уровень выставляет сигнал готовности принять данные и
квитанцию от вторичной функции пользовательского процесса. Квитанция поступает
на входной порт CON, а сигнал готовности на порт E_OUT первичной
функции. Модель первичной функции процесса пользователя для телеуправления
представлена на рис. 55.
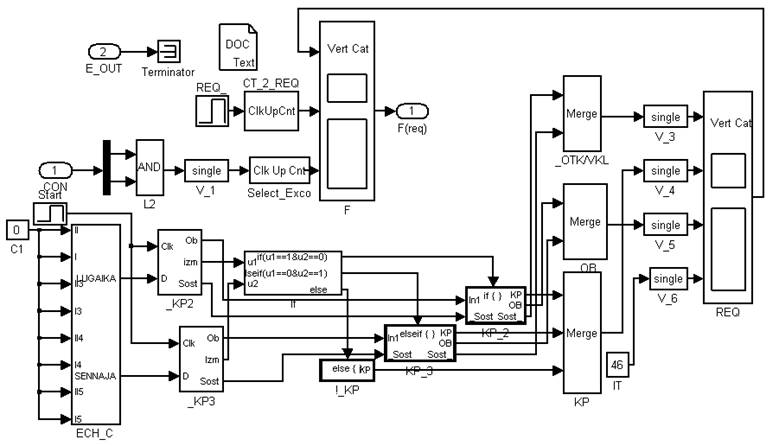
Рис. 55. Модель процесса пользователя первичной станции
Интерфейс управления объектами для диспетчера представлен блоком ECH_C. Результаты действий диспетчера выдаются в цифровой форме через выходные порты «LUGAIKA» и «SENNAJA». Для каждого контролируемого пункта предусмотрен блок обработки, задача которого определить номер выбранного объекта Ob, характер операции Sost и бит изменения состояния izm. Бит изменения состояния фиксирует ситуацию, когда диспетчер изменяет текущее состояние объекта. Результат действия диспетчера может принимать одно из трех значений: отключить – 1, включить – 2, отказ от операции - 3.
Для последующей обработки команде отключить присвоен номер 0, включить -1, а при отказе от операции выдается номер текущего состояния (0 или 1). Нумерация объектов осуществляется для каждого контролируемого пункта независимо от других КП.
Блок If позволяет дальнейшую обработку вести только для выбранного контролируемого пункта. Результаты обработки выставляют в виде вектора блоком формирования запроса REQ. Окончательно запрос формируется в блоке F, где добавляются данные об этапе приказа. Приказ подается за два этапа: предварительный (Select) и исполнение (Exco). Запрос на обслуживание каждого из этапов передается сервису связи через порт F(req). Сигнал REQ и счетчик CT_2_REQ обеспечивают нумерацию этапов, а счетчик Select_Exco контролирует выполнение первого этапа через порт CON. На этот порт поступает формируемое сервисом связи извещение (квитанция) о результатах доставки приказа вторичному процессу на контролируемом пункте.
На рис. 56 приведена модель интерфейса управления контролируемым пунктом, получающим питание от двух источников.
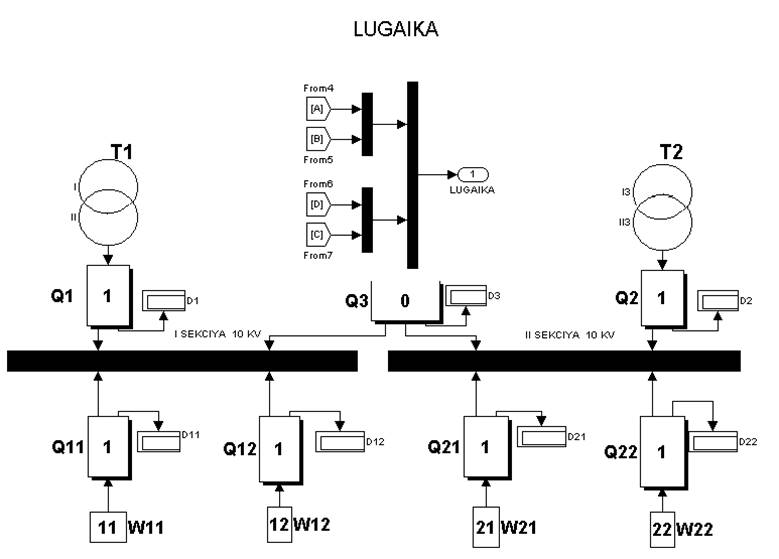
Рис. 56. Модель интерфейса управления контролируемым пунктом
![]() Контролируемый
пункт содержит две секции низкого напряжения с секционным выключателем и
выключатели отходящих фидеров. Внутри обозначений выключателей указывается его
текущее состояние, на дисплеях то состояние, в которое их требуется перевести.
Для выполнения операции необходимо дважды щелкнуть левой кнопкой мыши по
обозначению выключателя. Появляется меню, показанное на рис. 57. Меню содержит
наименование контролируемого пункта и коммутируемого присоединения. Команда
отдается щелчком левой кнопки мыши по одному из пунктов меню. Затем осуществляется
пуск работы модели Simulink.
Контролируемый
пункт содержит две секции низкого напряжения с секционным выключателем и
выключатели отходящих фидеров. Внутри обозначений выключателей указывается его
текущее состояние, на дисплеях то состояние, в которое их требуется перевести.
Для выполнения операции необходимо дважды щелкнуть левой кнопкой мыши по
обозначению выключателя. Появляется меню, показанное на рис. 57. Меню содержит
наименование контролируемого пункта и коммутируемого присоединения. Команда
отдается щелчком левой кнопки мыши по одному из пунктов меню. Затем осуществляется
пуск работы модели Simulink.
Вызов меню, установка исходного состояния выключателей и запоминание выбранного пункта меню производится средствам MATLAB. Для операции начальной инициализации подготовлен М-файл «op_init.m». Текст файла приведен в приложении E. В результате работы этих файлов в рабочей области образуется массив переменных, содержащих начальные состояния коммутационных аппаратов, код выбранного диспетчером пункта меню и оперативное название присоединения, например, для выключателя Q1 предусмотрены переменные: NUQ1, k1, str1. Связь М-файлов и блоков Simulink осуществлена через механизм обработки исключительных состояний (Callbacks).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.