По полученным значениям строим график динамической характеристики.
От начала координат влево по оси абсцисс откладываем отрезок в произвольном масштабе, начало которого принимаем за 0% загрузки, и наносим на него шкалу, соответствующую загрузке машины в процентах – от 0% до 100%. Через начало отрезка проводим перпендикуляр, на котором наносим шкалу динамического фактора для незагруженной машины Do. Масштаб этой шкалы определяем из следующего соотношения:
а![]() =а
=а ,
(6.2)
,
(6.2)
где а – масштаб шкалы для 100% загрузки автомобиля.
Для шкалы 100 процентов загрузки D = 0,05 соответствует а = 40 мм, тогда для шкалы 0 процентов загрузки Dо = 0,05 соответствует:
 =
=![]() мм.
мм.
Наносим на шкалу Do значения 0,05; 0,10; 0,15 … 0,50. Соединяем прямыми лини-ями одинаковые значения динамических факторов на осях D и Do.
Коэффициент сцепления для лежневой дороги j = 0,55 – 0,62 принимаем из с.98 [1]: j = 0,58.
Вычисляем значения![]() и
и ![]() при j изменяющимся в диапазоне от 0,1 до j, с шагом
0,1.
при j изменяющимся в диапазоне от 0,1 до j, с шагом
0,1.
Однозначные динамические факторы на шкалах ![]() и
и ![]() соединяют пунктирны-ми
линиями.
соединяют пунктирны-ми
линиями.
График контроля буксования представляет собой выраженную графически зависимость динамического фактора по сцеплению от нагрузки.
Для построения графика контроля буксования рассчитаем динамический фактор по сцеплению для загруженной и незагруженной машины по следующим формулам:
![]() =j
=j , (6.3)
, (6.3)
![]() =j
=j ,
(6.4)
,
(6.4)
где j - коэффициент сцепления;
G![]() - сцепной вес машины и прицепа с грузом, G
- сцепной вес машины и прицепа с грузом, G![]() =151954,6
Н;
=151954,6
Н;
G![]() - сцепной вес машины и прицепа без груза, G
- сцепной вес машины и прицепа без груза, G![]() =82404Н.
=82404Н.
Рассчитаем ![]() и
и![]() при значениях j от 0,10
до 0,58 (0,58- максимальное значе-ние коэффициента сцепления для лежневых дорог).
при значениях j от 0,10
до 0,58 (0,58- максимальное значе-ние коэффициента сцепления для лежневых дорог).
Таблица 6.2 –Коэффициенты сцепления для щебеночного покрытия
|
j |
|
|
|
0,1 |
0,046 |
0,068 |
|
0,2 |
0,091 |
0,135 |
|
0,3 |
0,137 |
0,203 |
|
0,4 |
0,183 |
0,270 |
|
0,5 |
0,228 |
0,338 |
|
0,58 |
0,265 |
0,392 |
Далее на осях D и Do откладываем в масштабе значения Dj и Dj о соответственно.
Соединяем значения Dj и Djо , полученные при одинаковых значениях j пунк-тирной линией и указываем соответствующее значение j.
Геометрические параметры автомобиля принимаем из [1] таблица 12, с. 99:
![]() мм;
мм; ![]() мм;
мм;
![]() мм;
мм; ![]() мм;
мм;
![]() мм;
мм; ![]() мм;
мм;
![]() мм; B (передние
колеса) = 2017 мм;
мм; B (передние
колеса) = 2017 мм;
![]() мм; В
(задние колеса) = 1792 мм;
мм; В
(задние колеса) = 1792 мм;
![]() .
.
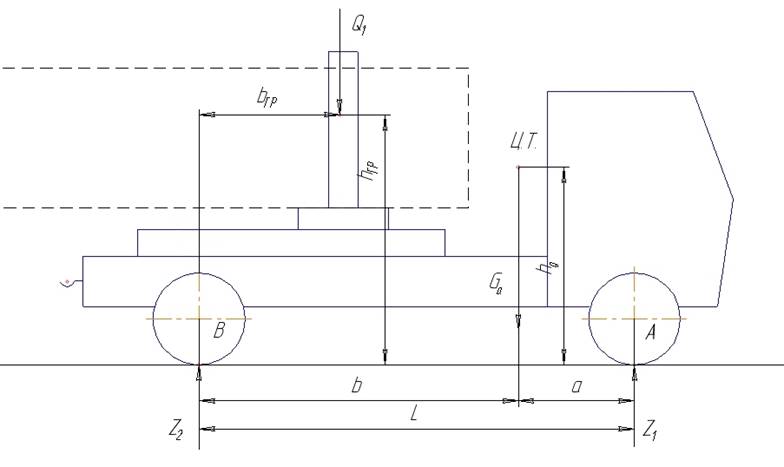
Рисунок 7.1 - Автомобиль с нагрузками на горизонтальной поверхности
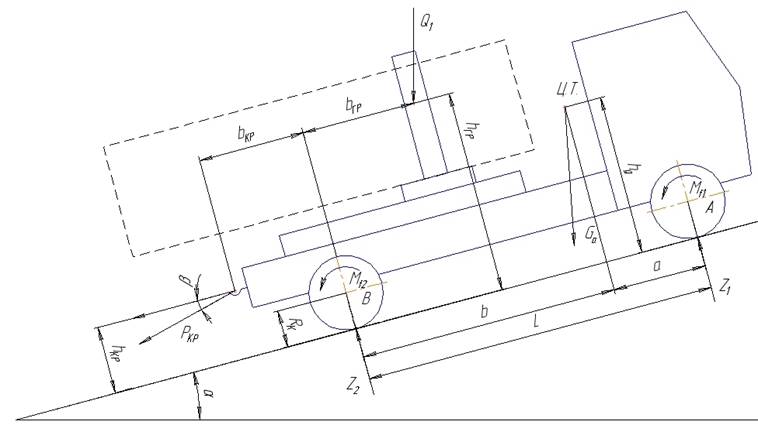
Рисунок 7.2- Схема автомобиль с нагрузками при движении на подъем
При определении нагрузок на оси и колеса автомобиля рассматриваем установившееся движение при малой скорости движения, т.е. Pw=0 и Pj=0.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.