Для того, чтобы динамическая система была устойчива, еёматематическая модель должна быть такой, чтоб Желаемая Логарифмическая Амплитудная Характаристика пересекала ось 0 dB под наклоном : -20dB
Мы будем искать частоты сопряжения, на которых происходят изломы ЖЛАХ:
1) ![]() -
частота на которой происходит излом первого участка ЖЛАХ, выходящего из
точки
-
частота на которой происходит излом первого участка ЖЛАХ, выходящего из
точки ![]() (от
–20 до –40 dB/декаду ),
(от
–20 до –40 dB/декаду ), ![]() (-40
db/декаду)
(-40
db/декаду)
2) ![]() -
частота сопряжения, находящаяся в начале среднечастотного участка ЖЛАХ,
отвечающего за устойчивость динамической системы.
-
частота сопряжения, находящаяся в начале среднечастотного участка ЖЛАХ,
отвечающего за устойчивость динамической системы.
3) ![]() -
частота сопряжения, совпадающая с концом среднечастотного участка ЖЛАХ,
отвечающего за устойчивость системы.
-
частота сопряжения, совпадающая с концом среднечастотного участка ЖЛАХ,
отвечающего за устойчивость системы.
4) ![]() -
граница малых постоянных времени, т.е. такая граница, за которой можно
пренебречь всеми постоянными времени.
-
граница малых постоянных времени, т.е. такая граница, за которой можно
пренебречь всеми постоянными времени.
Значение ![]() ,
находится на оси 0 dB и является опорной для определения этих
3-х частот.
,
находится на оси 0 dB и является опорной для определения этих
3-х частот.
|
М |
1.1 |
1.3 |
1.5 |
||
|
|
9.85 |
4.70 |
3.48 |
||
|
|
38.00 |
10.50 |
6.40 |
||
|
|
6.20 |
11.80 |
15.10 |
Найдем ![]() ,
, ![]() ,
,
![]() ,
,![]() …
…
1) Выбираем М – показатель колебательности
2) Определяем длины сопрягаемых участков ЖЛАХ (d,h,S)
3)
По величине ![]() и
h находим значение
и
h находим значение ![]() :
:
![]()
4)
По значениям ![]() и
d находим значение
и
d находим значение ![]() :
:
![]()
5)
По значению S и ![]() находим
находим
![]() :
:
![]()
Затем строим ЖЛАХ на полуплоскости:
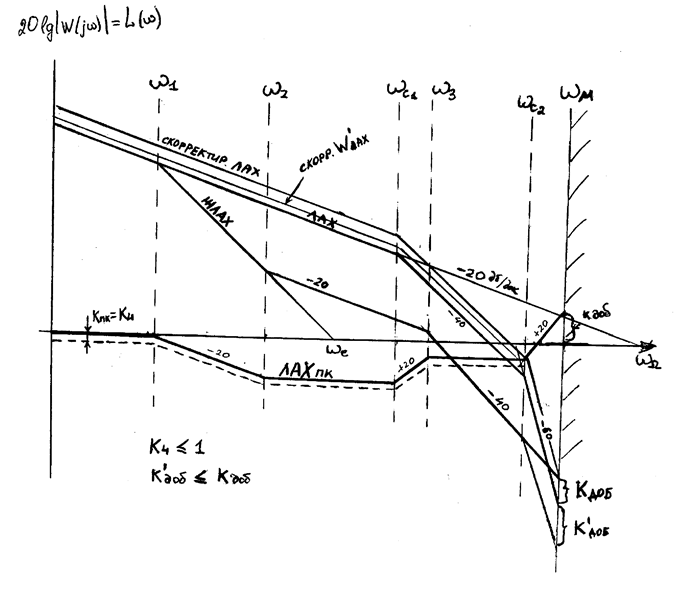
![]()
Построенная ЖЛАХ отвечает заданным требованиям по скорости, ускорению, точности, устойчивости и устойчивым постоянным времени.
Из исходной схемы (рис1) , добавляя звено
последовательной коррекции ![]() (рис
2), получаем желаюмую ЛАХ (рис3).
(рис
2), получаем желаюмую ЛАХ (рис3).
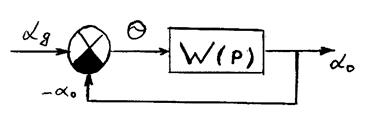

Рис2
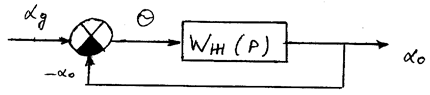
Рис3
![]() -
вид передаточной функции, которой соответствует ЖЛАХ следующего вида :
-
вид передаточной функции, которой соответствует ЖЛАХ следующего вида : ![]() -
эту характеристику мы и построили на рис ЖЛАХ1.
-
эту характеристику мы и построили на рис ЖЛАХ1.
Эта характеристика представляет
собой дробь, в числителе которой находится коэф-т ![]() , а в знаменателе P
в первой степени.
, а в знаменателе P
в первой степени.
А в точках сопряжения происходит
добавление частот ![]() ,
,![]() ,
,![]() ,
,![]()
![]()
![]() ;
; ![]() ;
;
![]() -
они описывают желаемую характеристику.
-
они описывают желаемую характеристику.
Назовем исходную ЛАХ ![]() ,
где
,
где
W(jw) – частотная характеристика из передаточной функции, полученной нами в результате расчета индивидуального задания нашей динамической системы. При замене P на jw получаем:
![]()
или в
знаменателе: ![]()
или в
знаменателе: ![]()
1) Если корни знаменателя дроби вещественные и
разные : ![]()
![]()
2) Если корни знаменателя дроби вещественные и
равные : ![]()
![]()
3) Если корни знаменателя дроби комплексные
сопряженные : ![]()
Найдем частоты сопряжения для построения исходной ЛАХ.
Это либо ![]() ,
либо
,
либо ![]() и
и
![]()
Если мы имеем две частоты сопряжения для построения: ![]() и
и
![]() ,
то :
,
то :

рис. “Жлах ПК”
Для того, чтобы найти Wпк(p), надо:
![]()
желаемое - исходное
Звено последовательной коррекции должно иметь ЛАХ находящююся в нижней (отрицательной) полуплоскости. В крайнем случае – на границе плоскостей. Это объясняется тем, что последовательная корекция осуществляется всегда так называемыми пассивными способами без использования дополнительных источников энергии.
Если исходная ЛАХ пересекает границу
малых постоянных ремени ![]() ниже
ЖЛАХ на величину
ниже
ЖЛАХ на величину
![]() [dB],
то исходную характеристику, перед вычитанием её из ЖЛАХ, надо поднять
параллельно самой себе на величину Kдобавочное. Этому равносильно
понижение ЛАХ последовательной коррекции.
[dB],
то исходную характеристику, перед вычитанием её из ЖЛАХ, надо поднять
параллельно самой себе на величину Kдобавочное. Этому равносильно
понижение ЛАХ последовательной коррекции.
Операции подъема исходной ЛАХ соответствует домножение коэф-та К3 на Кдобав-е
Напрмер, Кдоб(dB)=10 мм, след-но 13 dB
13 dB = ![]()
Если корни ![]() и
и
![]() равные
, то
равные
, то ![]()
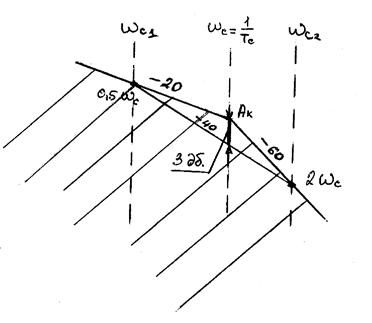
Рис 4
Надо найти величину ![]() и
и
![]() и
соединить эти точки.
и
соединить эти точки.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.