Мст(*)=Мст.м*sign(wотн), или mст(wотн)
*- переменная, от которой изменяется Мст.
w- угловая скорость или частота вращения [1/сек]
v- скорость поступ. перемещения
· a - угол поворота
e - угловое ускорение
Для поступ. движения x(y)- путь, а- ускорение
 |
q (рад.,т.д.) U1 (В) К2(В/рад=мВ/т.д.)
f(*)- функции, чаще нелинейные, f7- коэф. эквивалентного вязкого трения
Мы используем символическую форму записи:
D=d/dt – оператор дифференцирования, р=d/dt – оператор интегрирования.
Рассмотрим 1 вид операторов преобразования, дробно-рациональные:
Числитель – это полином: anpn+an-1pn-1+…+a1p+a0
Оператор позволяет произвести дифференцирование n раз. Применяется запись:
(anpn+an-1pn-1+…+a1p+a0)aд
В знаменателе: (отличие по коэффициентам)
bmpm+bm-1pm-1+…+b1p+b0
m и n – любые. Возможен случай m >= n
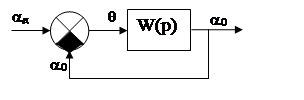
W(p) - разомкнутая передаточная функция
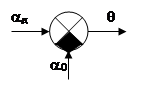
Ошибка графически изображается сумматором:
 |
 |
Ф(p) - передаточная функция в замкнутом состоянии
q = aд - a0 Þ aд = q + a0
F(p) = a0/aд =a0/(q+a0) =(a0/q)/(1+a0/q) = W(p)/(1+W(p))
Fq(p) = q/aд = 1/(1+W(p)) Þ q = aд/(1+W(p))
Передаточная функция – это отношение выходного сигнала к входному.
Воздействие на входной сигнал выражением, совпадающим с передаточной функцией получается выходной сигнал – это воздействие оператора.
Оператор вида К2 (дробно-рациональный оператор), где все коэффициенты кроме а0 и b0 равны 0.
a0 = K6/(T6p + 1)
b1 = T6, все остальные коэффициенты =0.
Если в любой передаточной функции замкнутой системы подставить дробно-рациональное выражение передаточной функции разомкнутой системы, привести эту функцию к дробно-рациональному выражению, привести все подобные, то знаменатель такой передаточной функции называется характеристическим полиномом.
Если характеристический полином приравнять к 0, то можно получить характеристическое уравнение. В общем виде может быть записано:
1 + W(p) = 0![]()
![]()
![]()
W(p) = k/(TмТяр3 + Тмр2 + р)
k = k2k3k4k5kдвk9
kдв =
1/k8![]()
1 + k/( TмТяр3 + Тмр2 + р) = 0
TмТяр3 + Тмр2 + р +k = 0 -характеристическое уравнение.
Чаще всего характер движения ДСУ описывается системой дифференциальных уравнений. Дифференциальное уравнение показывает, как изменяется переменная соответствующей производной в зависимости от правой части.
![]()
Чтобы найти закон движения надо найти интеграл, т.е. решить это уравнение.
Та же задача интегрирования решается с помощью передаточной функции.
 |
|||
Tpx + x = ku
Tpx = -x + ku
px=![]()
![]()
Система замыкается, чтобы система была достаточно устойчива.
 |
Надо минимизировать q
![]() - коэффициент усиления системы
- коэффициент усиления системы
![]()
![]()
a0 уст - a0 установившееся
Увеличение К приводит к уменьшению q, но до определенного момента, т.к. может оказаться, что a0 > aд и q отрицательное (эффект развала системы). Система неустойчива.
Величина коэффициента усиления влияет на величину ошибки и на устойчивость системы.
Чтобы система была устойчива можно воспользоваться направленным изменением коэффициента характеристического уравнения.
Общий вид решения дифференциального уравнения:
![]()
I – порядок системы
li - корни характеристического уравнения
Ci - постоянная интегрирования (из начальных условий)
Дифференциальное уравнение – сумма взвешенных экспонент т.к. e > 1: Если вещественные части корней отрицательные, то х (t) ® 0 с течением времени, если положительные, то то х (t) ® ¥ и система неустойчива.
Корни характеристического уравнения в общем виде:
li, i+1= ai +- jbi
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.