![]() - оператор, который показывает частотные свойства тока.
- оператор, который показывает частотные свойства тока.
m1=kмiя – электромагнитный момент двигателя
m2/Iя’ – вращательное ускорение
I*ε = M – инерционный момент
ε – угловое ускорение
αдв=?
ωдв(f)
19.02.99
 |
αд Θ
-элемент сравнения.
α0
Входной элемент сравнения. αд -угол поворота командной оси.
α0 -угол поворота исполнительной оси
Θ -выход. Алгебраическая сумма всех входов. Θ = αд + α0.
Единичное входное воздействие αд=0 при t<0
αд=1 при t>0
 αд
αд
α0
1 если взять αд/dt, то получится единичный
импульс.
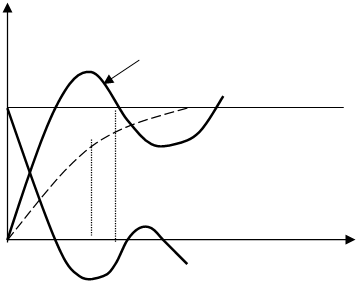
tn tnзад ±Θзад - зона ошибки(±5%)
tn2 tn-время переходного процесса
0 3→ tn≤tnзад
3 - кривая ошибки - зеркальное отображение α0
![]()
![]() Если по той или иной кривой α0(t)(ось 1)и Θ(t)(ось 0) при t→∞ стремятся к 0
(затухают), то такая ДСУ называется устойчивой
в противном случае (Θ(t)→0; α0(t)→αд(∞), т.е. 1) система
неустойчива (разваливается)
Если по той или иной кривой α0(t)(ось 1)и Θ(t)(ось 0) при t→∞ стремятся к 0
(затухают), то такая ДСУ называется устойчивой
в противном случае (Θ(t)→0; α0(t)→αд(∞), т.е. 1) система
неустойчива (разваливается)
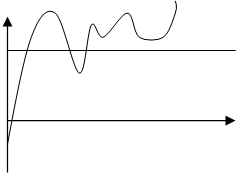
![]() разваливающаяся система αд
разваливающаяся система αд
t
Если система неустойчива и мат. модель адекватно отображает эту систему ,то это означает, что в решении мат. модели этой системы есть функции от времени стремячиеся к ∞.
![]()
|
где πi - характеристический корень ур-я.
I-число характеристических уравнений
(порядок уравнения или порядок системы)
Ci - постоянная интегрированияб которая определяется из начальных условий.
Начальное условие должно иметь хотя бы одну переменную ≠ 0, тогда Сi - определимо.
πi могут иметь следующие значения:
1. Нулевые.
2. Вещественные (+ и -).
3. Комплексные сопряженные.
Если вещественные части корней в решении диф.ур-я - отрицательные и ≠ 0, то с течением времени t это решение стремится к устойчивому положению, если хотя бы один из корней имеет положительную часть, то решение(положение) будет неустойчивым.
Используются косвенные методы определения корней характерестического уравнения.
Мы будем использовать критерий Раута-Гурвица.
Выбор исполнительного двигателя(ИД):
Он определяется мощностью,которую надо обеспечить на объекте.
![]()
|
|
Mo - момент [н·М] ; Мо = Модинамич.+Мостатич.
Мостатич = Мсух. трения + Мветровой нагрузки + Мнеуравновешен-ти + Мтехнологич-й
p·ωo/ε
|
![]() у
нас Мостатич=Мс.т.; Мс.т.=Мс.т.max · sign(Dαдм)
у
нас Мостатич=Мс.т.; Мс.т.=Мс.т.max · sign(Dαдм)
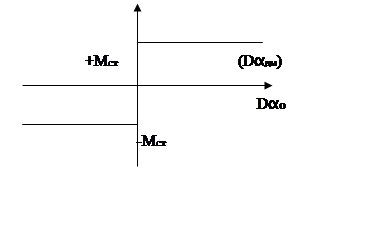 Момент
сил трения направлен всегда в сторону противоположную
движению.
Момент
сил трения направлен всегда в сторону противоположную
движению.
Это недифференцируемая функция.
αэкд(t) = αэдм(t)sin(2π/Tэ) · t
у нас три вида заданного режима:
1. Dαдм , D2αдм ;
2. Dαдм , Tд: αдм =Dαдм (Tд/2π);
3. αдм , Tд ;
Для 1-го режима нужно найти αэдм(t) и Тэ
Dαэкдм = 2παэдмcos(2π/Tэ) · t = Dαэдм(t) cos(2π/Tэ) · t (1-я производная)
![]()
![]()
![]() α2дм=(Тэ/2π) · Dαэдм
α2дм=(Тэ/2π) · Dαэдм
D2αэдм(t) = -4π2 (1/Т2э)·sin(2π/Tэ)·t·αэдм = - D2дм ·αэдм ·sin(2π/Tэ) · t ;
D2αэдм = Dαдм ; D2αэдм = D2αдм ; отсюда
![]()
![]()
![]()
![]()
![]()
![]()
![]() Tэ = (Dαдм/D2αдм) · 2π αэдм
= (Тэ/2π)Dαдм
Tэ = (Dαдм/D2αдм) · 2π αэдм
= (Тэ/2π)Dαдм
 |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.