Для того чтобы перейти от структурной схемы к уравнениям состояний, 1-е уравнения, которые имеют операторы дифференцирования надо разрешить относительно старшей производной; если это уравнение более чем первого порядка (решенное) то это приведет к записи в форме Каши, в виде стольких уравнений, каков его порядок.
|
![]() aд q
aд q
![]() a0
a0
Порядок диф. уравнений равен порядку знаменателя =3-й порядок, должны получить 3 уравнения (в форме Каши).
1). q = aд - a0 уравнение ошибки
2).  -
передаточную функцию ( ) мы будем использовать так чтобы получить 1-ую
производную.
-
передаточную функцию ( ) мы будем использовать так чтобы получить 1-ую
производную.
Преобразуем:
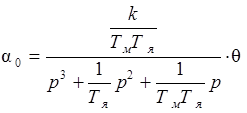 - запишем в виде диф. уравнения:
- запишем в виде диф. уравнения:
![]() (*)
(*)
введем новые переменные ![]() (1)
(1)
![]() (2)
(2)
запишем уравнение (*) с учетом этих переменных:
![]() подставим q = aд - a0
подставим q = aд - a0
![]()
Разрешив это уравнение относительно 1-й производной, – решим задачу
![]() (3)
(3)
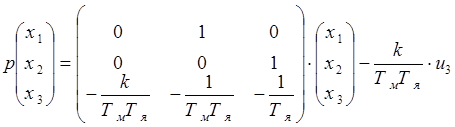
Получили уравнение 3-го порядка, имеем переменные X3,X2, a0 и aд – внешняя переменная (входной сигнал).
Как изменилась матрица А в этом случае:
X1=ao
Имеем X2=pao
X3=pX2
Уравнение состояний:
![]()
![]()
 aд;
aд;
b33
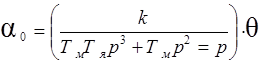
Если передаточная функция W(p) представлена выражением :
![]() - общий вид ;
- общий вид ;
(в нашем
(частном ) случае : ![]() ;
; ![]() ;
;
![]() ;
; )
)
то уравнение можно записать :
 Дополним это уравнение состояния уравнением выхода :
Дополним это уравнение состояния уравнением выхода :
![]()
![]()
вектор строка X- вектор столбец ; d-коэффициент при входном воздействии.
Цифра 1 в вектор строке должна стоять на том месте, где находится переменная интересующая нас.
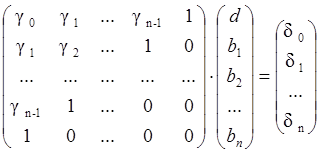
Для того чтобы найти значения b1,b2…..bn необходимо и достаточно решить уравнение :
09.04.99
x=Ax
x(t)=SUielt(.(sin(bit)+cos(bit)
lj,i+1=aj±bi
рис.1
рис.2
рис.3
подача на входа 1 радиан рис.4
заменим участок синусоиды на прямую рис.5
в Simulink работаем с прямой прикладывать Wн и Мн и смотреть какое напряжение на двигателе (Uн’) надо устанавливать рис.6
в Simulink можно взять статическую характеристику двигателя (saturation) зона насыщения рис.7
x20 при Х1>X10
x2= k при ½x1½<10
-x20 при x1<-x10
Надо найти такую комбинацию зон насыщения для (Uн,Wн,Мн), то есть найти aд, гарантирующую qmax , обеспечивающее всю работу qmax в зоне линейности.
Реальная ДСУ всегда описывается
j(Px,X,U,t)=0 x(t0)=x0
Общее нелинейное ДСУ с начальными параметрами
X,pX,X0 (принадлежат) ÎRs
Векторы-столбцы одномерного Риманого пространства размерности S, это такие пространства, которые описывают математическое соотношение с использованием свойства ортогональности
Нулевые риманого пространства – точки
Одномерные – линии
Двухмерные – плоскость
Трехмерные – объем
Суммы квадратов проекций вектора в римановом пространстве всегда равняется длине этого вектора
UÎRq
t – время (аргумент)
j(x) ÎRs
x1
x2
x= …..
xs
j1(*)
j2(*)
j(*)= …….
js(*)
px=y(x,u,t) x(t0)=x0
y(*)ÎRs
(D)
если нам это удалось материализовать, то получаем рх=Ах+Вu x(t0)=x0
чтобы так преобразовать, будем сталкиваться со статическими характеристиками, имеющими следующий вид рис.8
рис.9
Статическая характеристика (D) матричного уравнения
0=y(x,u,t) – уравнение характеристики
U=const, то есть если все составляющие этого вектора
15.04.99
Математическая модель несёт в себе информацию о функционировании ДСУ. Мат. модель в этом смысле аналогична чертёжно-технической документации технических и машинных динамических систем. Мат. модель можно подвергнуть операции декомпозиции.
Операция декомпозиции – это разбиение сложных мат. моделей на отдельные подмодели, которые можно использовать самостоятельно.
D(x)=A(м)х+В(м)u, где х(to)=хо
Dх,х,хoÎRs
левая часть – вектор внутренних переменных (переменные состояний, фазовые координаты), который возникает в результате внутренней структуры этого канала, квадратичной матрицы А(м)ÎRs*s и за счёт внешних воздействий (2-ая часть правой части).
UÎRQ – вектор размерности, который может состоять из двух частей:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.