Как и применительно к ГТ, при вращении гироскопа вместе с объектом вокруг оси h со скоростью uh создается гироскопический момент вокруг x, но, в отличие от ГТ, он уравновешивается моментом, создаваемым
демпфером. Поскольку демпфер создает усилие только при движении, равновесию
моментов соответствует вращение гироскопа вокруг x c постоянной
скоростью ![]() ,
пропорциональной (в линейном приближении) uh.
Следовательно, сам угол b пропорционален интегралу от uh.
,
пропорциональной (в линейном приближении) uh.
Следовательно, сам угол b пропорционален интегралу от uh.
Чтобы получить этот результат аналитически, обратимся к уравнению (52), приняв в нем с=0 (что соответствует исключению пружины) и полагая, как и ранее, b малым. Тогда вместо (52) получим
![]() , (60)
, (60)
где
k = H/h![]() 2, T = J/h
2, T = J/h![]() 2, а остальные обозначения сохраняют прежний смысл.
Параметры k и Т называют коэффициентом усиления и постоянной
времени ГИУС.
2, а остальные обозначения сохраняют прежний смысл.
Параметры k и Т называют коэффициентом усиления и постоянной
времени ГИУС.
Как видно из (60), ГИУС - апериодическое интегрирующее звено, которое по затухании переходного процесса выдает значение интеграла от uh с коэффициентом усиления k. Основные ошибки ГИУС обусловливаются вторым слагаемым правой части (60), погрешностью коэффициента усиления k и динамической ошибкой.
Из приведенного анализа вытекает одно важное обстоятельство, касающееся условий применения ГИУС. Поскольку угол b должен находиться в ограниченных пределах (при b = ± 90° ГИУС, очевидно, просто теряет работоспособность), прибор может использоваться, главным образом, в индикаторном режиме, т.е. основание прибора должно отрабатывать измеряемую ГИУС скорость (при этом ГИУС измеряет ошибку отработки). В частности, ГИУС может успешно применяться (и применяется) в гиростабилизаторах.
|
|
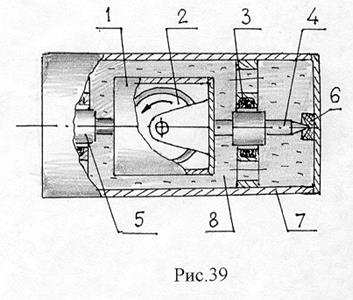
На практике наиболее широко используется конструкция ГИУС, предложенная в 1945 г. русским ученым Л.И.Ткачевым - поплавковый интегрирующий гироскоп (ПИГ). Его схема изображена на рис.39. Прибор включает поплавок 1 в виде цилиндра, внутри которого размещен гироскоп 2 (при этом корпус поплавка является одновременно кожухом гироскопа) и датчик угла 3. Для управления ориентацией ПИГ (при его размещении, например, на ГСП) на ось подвеса 4 поплавка может быть установлен датчик момента 5. Ось подвеса 4 устанавливается в камневых опорах 6, подобных опорам, используемым в часовых механизмах. Вся полость между корпусом 7 и поплавком заполняется вязкой жидкостью 8.
Использование вязкой жидкости преследует две цели.
Во-первых, она создает момент вязкого трения, что обеспечивает требуемое функционирование прибора.
|
|
Во-вторых, благодаря создаваемой ею архимедовой силе разгружаются опоры. Для этого конструкция разрабатывается таким образом и подбирается такая жидкость, чтобы плотность последней была равна средней плотности поплавка. Таким образом, поплавок имеет нейтральную плавучесть. Благодаря разгрузке опор в качестве них могут использоваться опоры с минимальной площадью контакта трущихся моментов - опоры типа "игла-камень", применяемые, как отмечалось, в часах. Это позволяет существенно снизить влияние на точность вредного момента трения (см. (60)). В качестве упомянутой выше жидкости используются, как правило, фторорганическая (плотность 1,9 г/см3) и хлорорганическая (плотность 2,7 г/см3) жидкости.
ПИГ, хотя и являются достаточно дорогими в изготовлении приборами, широко применяются в высокоточных системах навигации объектов, движущихся с высокими перегрузками, поскольку в этих условиях обеспечивают высокий уровень точности измерений.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.