Основная проблема обеспечения точности касания полосы заключается в том, что на этапе выравнивания, при малых скоростях и больших углах атаки, летчик не видит точку, куда должен приземлится самолет. Помимо этого касание самолета происходит после достижения скорости парашютирования, а у летчика нет средств для точного прогнозирования момента достижения указанной скорости.
Для повышения точности касания полосы, предлагаю использовать систему указания мнимой точки посадки самолета
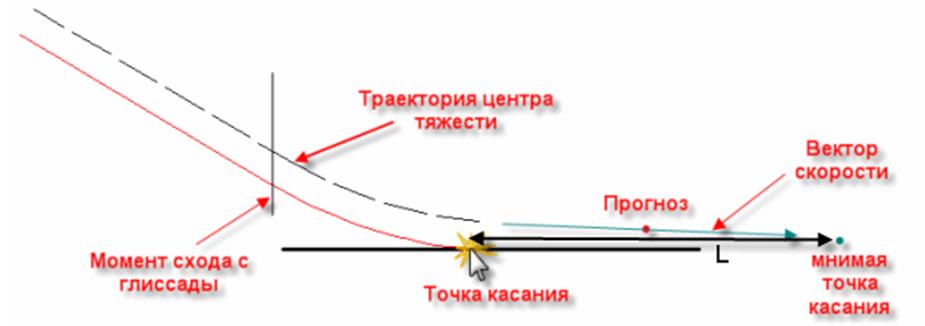
Идеология метода заключается в использовании прогноза положения самолета для контроля траектории движения и скорости.
После схода с глиссады летчик отклоняет органы управления и совмещает индикатор прогноза с некоторым неподвижным указателем, который назовем “мнимой точкой касания”.
Координаты мнимой точки посадки рассчитываются бортовым вычислительным комплексом в зависимости от характерных параметров самолета на момент схода с глиссады ( V, Vy, q, H, т.д. ). Мнимая точка отображается в пространстве при помощи системы визуализации.
В момент касания ![]()
|
|
1.5.1 |
Где:
h - высота центра тяжести самолета относительно земли в момент касания.
|
|
|
Посадка с использованием мнимой точки касания |
DL – смещение мнимой точки посадки относительно требуемой.
Сход с глиссады и посадка будут происходить по экспоненциальной траектории, по принципу посадки в автоматическом режиме. При этом летчик не теряет контроль над самолетом, и может вносить поправки в траекторию. Также можно с относительной точностью судить об изменении скорости самолета, ориентируясь на перемещение указателя прогноза.
1.6 Основные задачи дипломной работы.
Для реального внедрения предложенной выше системы требуется провести большой объем теоретических и практических исследований, которые помогут понять особенности поведения летчика при посадке на самолете с установленной системой.
На первом этапе исследований требуется дать заключение о возможности применения системы на этапе посадки. А также понять дает ли применение системы выигрыш по сравнению с курсо-глисадной. Далее требуется провести анализ оптимальных характеристик системы для получения наилучшего эффекта.
В связи с масштабностью поставленной задачи, исследовать все требуемые вопросы не представляется возможным. В данной работе сделана попытка анализа возможности применения системы, а также исследования основных закономерностей поведения летчика, при различных параметров системы визуализации.
Ниже приведена сводная таблица решаемых задач и перечень мероприятий для их исследования.
|
Исследования возможности совершения посадки на самолете с установленной системой визуализации траектории. |
- Исследование математической модели самолета на этапе посадке. - Разработка системы для моделирования захода на посадку самолета в режиме реального времени. - Разработка алгоритма управления модели от внешнего источника (джойстика). - Разработка системы визуализации процесса захода на посадку. - Разработка системы указания точки прогноза положения самолета. |
|
Оптимизация параметров системы захода на посадку. - Оптимизация формы и размеров прямоугольников, образующих посадочный коридор - Оптимизация расстояний между прямоугольниками. - Исследование зависимости точности пилотирования от кривизны посадочной траектории. - Исследование влияния прогноза на точность пилотирования. |
- Разработка системы записи результатов эксперимента. - Разработка анализатора полученных результатов. - Сравнение результатов опытов при различных условиях - Построение графиков зависимостей точности пилотирования от различных параметров системы. |
|
Исследование возможности выполнения посадки на самолете с установленной системой указания мнимой точки посадки. |
- Исследование зависимости точности касания полосы от применяемой системы индикации. - Разработка анализатора полученных результатов. - Построение графиков зависимости точности касания от применяемой системы визуализации. |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.