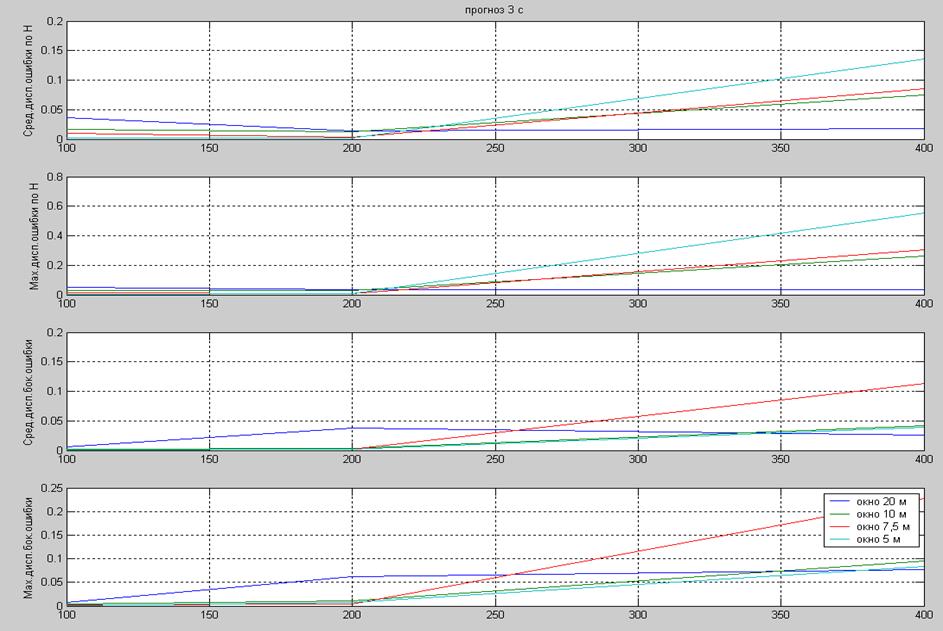
- Использование прогноза дает существенный выигрыш в точности на всех режимах. Точность пилотирования увеличивается примерно в 10 раз.
- С увеличением радиуса кривизны траектории использование прогноза позволяет сократить время установления траектории в заданном коридоре. Для прямолинейной траектории время установления в заданном коридоре примерно 7 с в не зависимости от того указывается прогноз или нет. Для радиуса разворота 10000м время установления снижается с 14 с (без прогноза) до 5-8 с (с указанием точки прогноза). С возрастанием сложности выполняемой задачи летчик начинает сильнее использовать дополнительную информацию.
5.2 Зависимость точности пилотирования от параметров системы визуализации
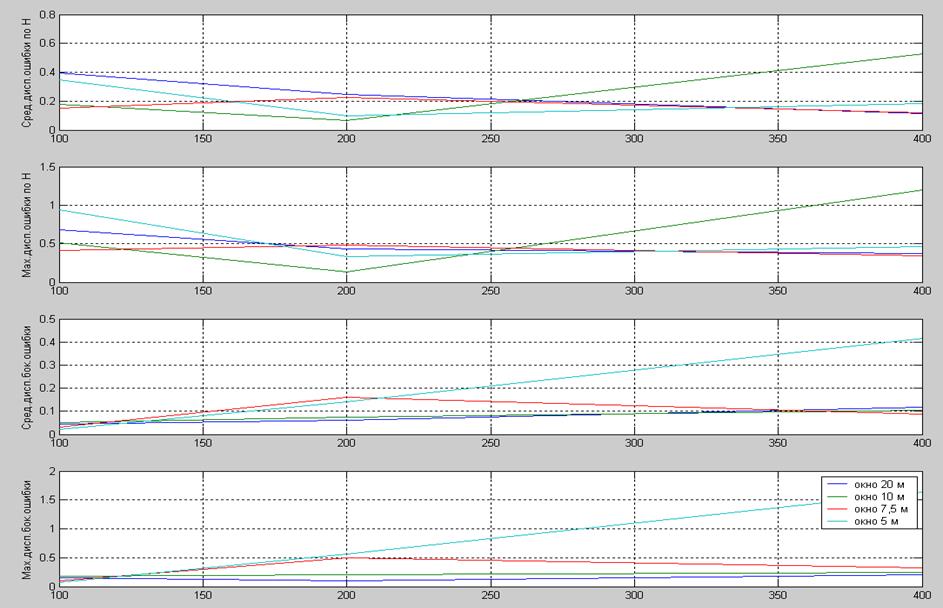
Для того чтобы определить оптимальные параметры системы визуализации построим графические зависимости точности пилотирования как функция от размера и расстояния между квадратами для всех исследуемых траекторий.
|
|
|
|
|
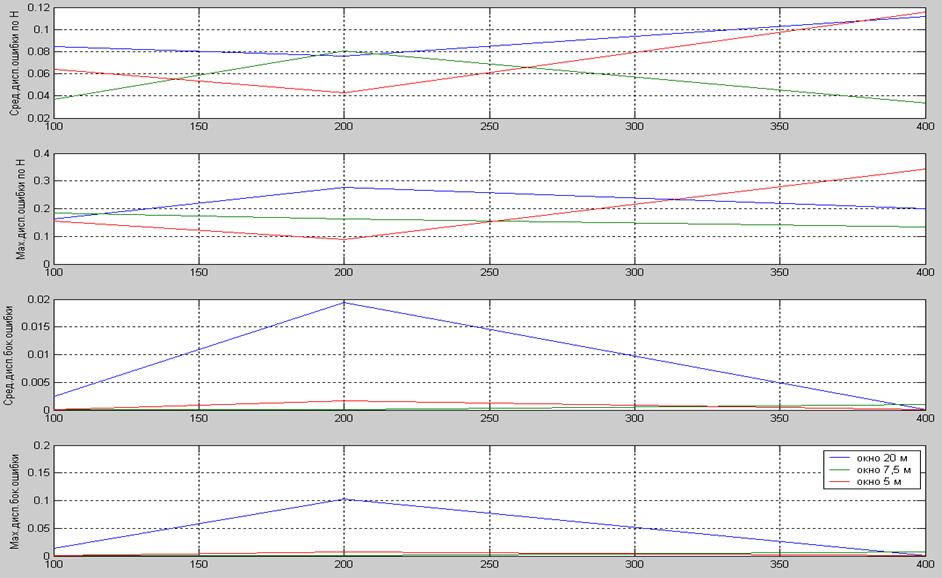
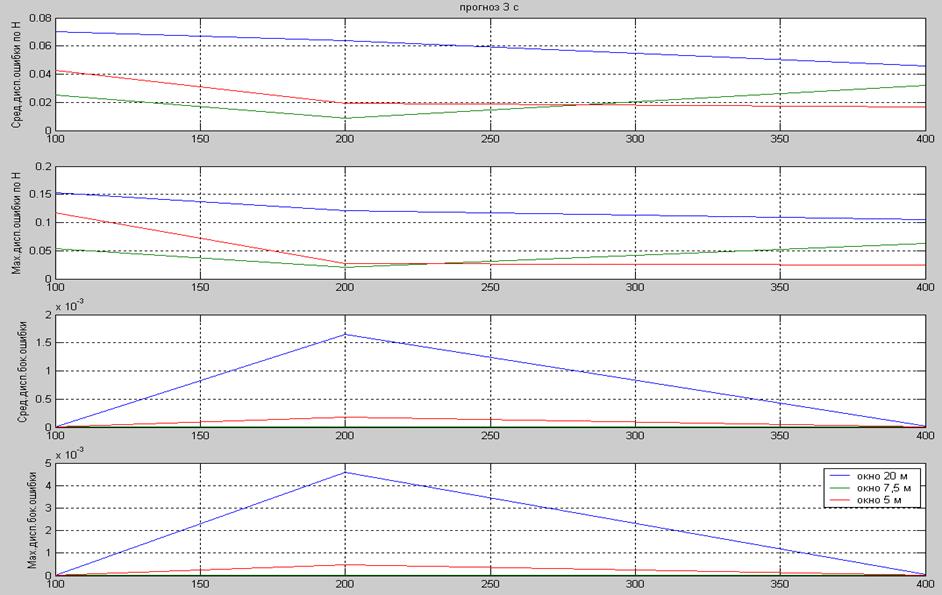
Прямолинейный полет |
|
|
|
|
|
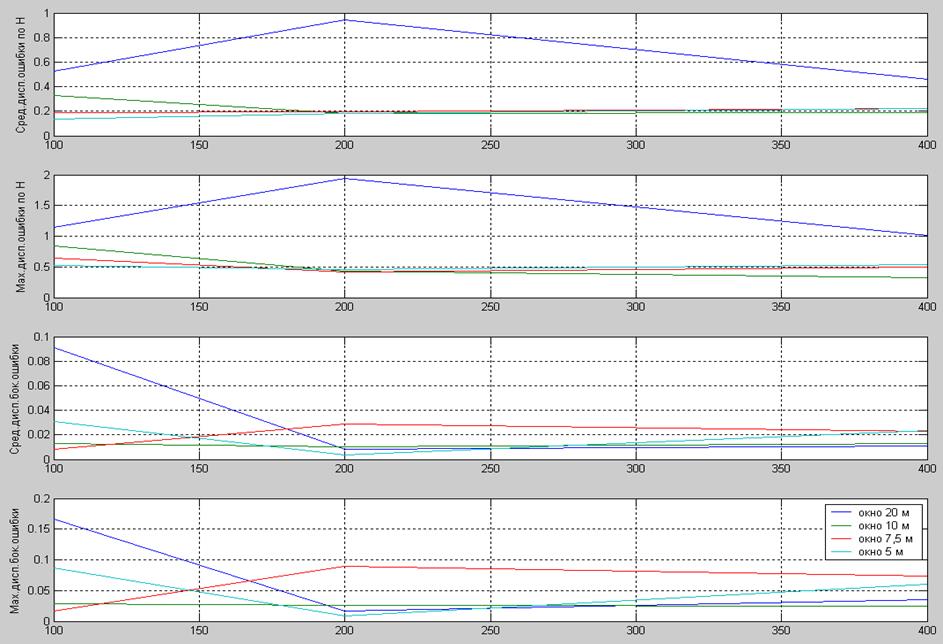
Радиус траектории 20000 м |
|
|
|
|
|
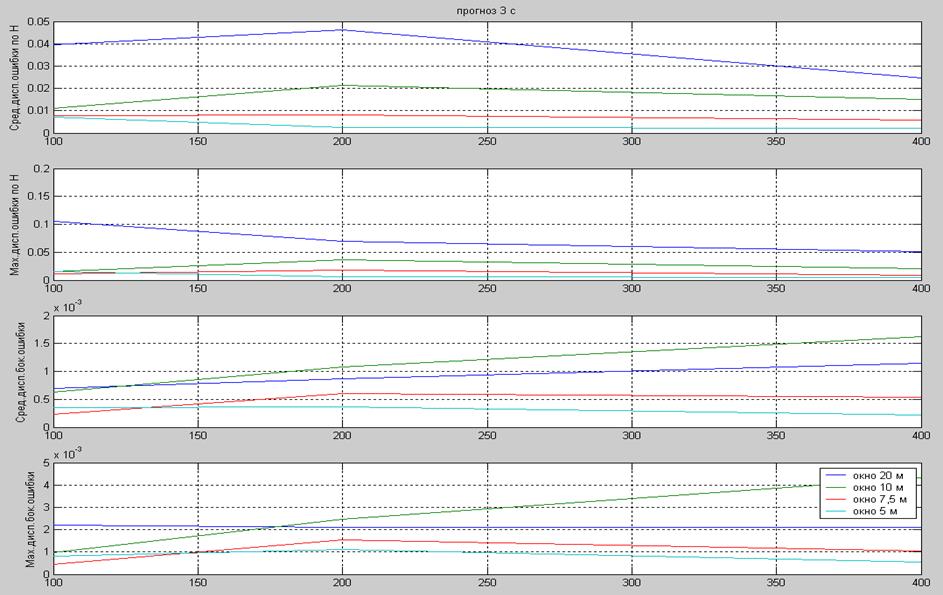
Радиус траектории 10000 м |
Проанализировав полученные результаты можно сделать следующие выводы:
- Для прямолинейного полета оптимальное значение (минимальная дисперсия боковой ошибки и ошибки по высоте) расстояния между квадратами лежит в районе 200 м. При этом средняя дисперсия ошибки примерно 0,04. Дальнейшее уменьшение расстояния между квадратами приводит к тому, что летчик начинает визуально воспринимать квадраты как сплошной коридор, вследствие чего он перестает управлять самолетом путем изменения угла тангажа, а начинает парировать ошибку изменением высоты полета. Управление высотой, без использования дополнительной информации, невозможно по причине высокой степени астатизма системы.
- Оптимальный ( дисперсия ошибки минимальна) размер квадратов в прямолинейном полете примерно 7 метров, дальнейшее уменьшение размера приводит к неосознанной раскачке летчиком самолета, так он пытается парировать даже очень незначительные отклонения от правильного курса.
- Указание прогноза приводит к тому, что в прямолинейном полете, летчик начинает использовать прогноз для «наведения» на определенную точку конца прямолинейного участка. В данных условиях размеры и расстояния между квадратами никак не влияют на точность пилотирования, информации от прогноза достаточно для точного следования по правильной траектории. Дисперсия уменьшается при этом в 2 раза и равна 0,02
- Для криволинейных траекторий полета с малыми радиусами разворота наблюдается минимум дисперсии ошибки по высоте в районе 200 метрового расстояния между квадратами. Минимум менее выраженный (дисперсия в меньшей степени зависит от расстояния между квадратами), чем при прямолинейной траектории.
- Наблюдается раскачка по высоте для размеров квадратов менее 7 метров. Наблюдается минимум дисперсии боковой ошибки и ошибки по высоте при размерах квадратов 7-9 метров. Среднее значение дисперсии 0,2 .
- Добавление прогноза приводит к улучшению точности пилотирования на всех режимах и падению значимости остальных параметров системы визуализации (размера и расстояния между квадратами). Хорошую точность (дисперсия равна 0,005-0,02) можно обеспечить для расстояний между квадратами, лежащими в диапазоне от 100 до 400 метров, и размеров от 10 до 5 метров. Наблюдается незначительное улучшение точности пилотирования при уменьшении размеров квадратов и сокращения расстояния между ними.
- Для больших радиусов разворота: при парировании ошибки по высоте наблюдается минимум дисперсии при расстоянии между квадратами 200 м, при парировании боковой ошибки оптимальное расстояние составляет примерно 100 м. Среднее значение дисперсии составляет 0,2
- Размеры квадратов не оказывают существенное влияние на точность парирования боковой ошибки. Размеры в диапазоне от 5 до 10 метров обеспечивают минимальное значение дисперсии боковой ошибки. Минимальное значение дисперсии ошибки по высоте достигается при размере квадратов 10 м.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.