Под посадкой понимают всю совокупность процессов предпосадочного маневрирования, обеспечивающего вписывание самолета в заданную траекторию снижения, движение по этой траектории и собственно посадку. В соответствии с различием задач, решаемых в этих процессах, обычно рассматривают 3 фазы посадки - I, II и III.
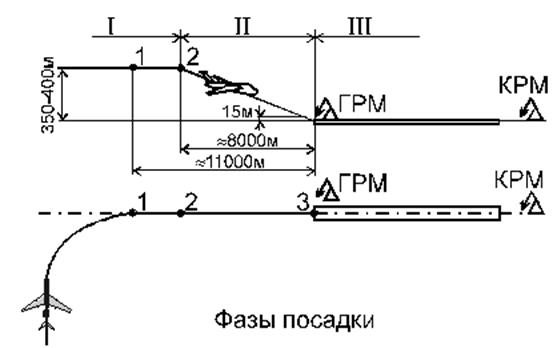
На первой фазе самолет вначале выводится на осевую линию ВПП (точка 1), затем производится выпуск шасси, закрылков и других средств механизации крыла, а скорость полета уменьшается до скорости планирования Vплан.
В течение всей первой фазы высота полета сохраняется постоянной и равной 350-400м. Заканчивается первая фаза в точке 2 пересечения траектории с радиотехнической глиссадой.
На второй фазе осуществляется планирование самолета с постоянной скоростью Vo=Vплан. Концом второй фазы удобно считать точку 3 начала выравнивания, что соответствует в среднем высоте ~15м. поскольку над порогом ВПП высота глиссады составляет как раз 15м, в нормальных условиях вторая фаза должна заканчиваться над порогом ВПП.
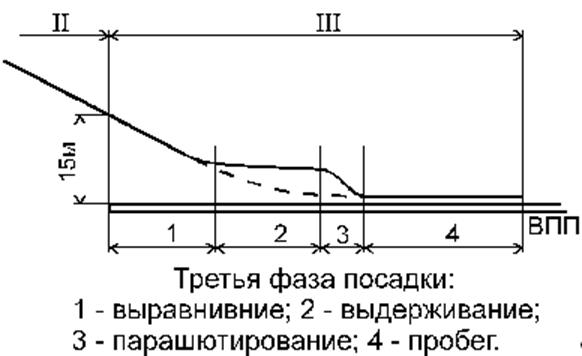
На третьей фазе траектория самолета обычно содержит участки выравнивания, выдерживания, парашютирования и пробега. При автоматическом управлении задаваемая траектория движения самолета на воздушном участке имеет, как правило, вид экспоненты (пунктир на рис.).
Управление самолетом на второй фазе посадки представляет наиболее сложную задачу вследствие двух причин. Во-первых, высокие требования к точности стабилизации самолета на глиссаде ужесточаются по мере приближения к ВПП. Во-вторых, именно на этой фазе летчику приходится принимать решения о возможности успешного завершения посадки или об уходе на второй круг.
1.2 Действия летчиков на этапе посадки
Самолет при заходе на посадку, независимо от того управляется ли он вручную или автоматически, постепенно переводится из крейсерской в посадочную конфигурацию выпуском шасси и закрылков. В процессе этого движения может быть выполнен ряд операций, направленных к снижению скорости, — дросселирование двигателей, выпуск интерцепторов или тормозных щитков. В результате должна быть достигнута расчетная скорость для данной конфигурации в соответствии с погодными условиями и требованиями службы движения.
Радиосвязь с наземным диспетчером должна быть четкой и бесперебойной, не засоренной аббревиатурами. Неразборчивые, двусмысленные сообщения могут привести к тяжелым последствиям. Все члены экипажа обязаны вести контроль и наблюдения за приборами.
Экипаж должен точно знать положение пиков высот на земле и общую картину рельефа местности. Эти данные, как правило, подготавливаются заранее и имеются в журналах, маршрутных картах и в планах. Но иногда эти данные трудно выявить из навигационной документации, где отметки земных высот и отметки высот летной траектории плохо различимы из-за нечеткой печати.
Во время посадки должны быть учтены все возможные состояния погоды и аэродромной конкретной метеообстановки — лед, снег, туман, шторм, ветер, болтанка, боковой ветер, вихри, лужи и гололед.
На посадке вполне вероятной процедурой может быть уход на второй круг (повторный заход на посадку).
К моменту захода у пилота должны быть основные расчетные данные о посадочной массе самолета, погодном минимуме, минимальной скорости посадочного снижения (или скорости пересечения торца ВПП).
Хорошо известно, что наиболее опасной фазой захода на посадку, где легко допустить ошибку, является тот промежуточный момент, когда пилот разделяет внимание между наблюдением за приборами и за обстановкой вне самолета. А между тем его мозг занят корреляцией результатов наблюдений и воплощением их в управляющие движения. Не касаясь очевидной трудности этой задачи, следует обратить внимание на психофизиологический фактор, который затуманивает ясность суждений пилота.
1.3 Основные проблемы возникающие на этапе посадки
Исходя из выше сказанного, можно выделить ряд проблем возникающих на этапе посадки.
- обеспечение точности позиционирования самолета относительно заданной траектории оптимального снижения,
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.