1. Входные управляющие сигналы, переменные сигналы.
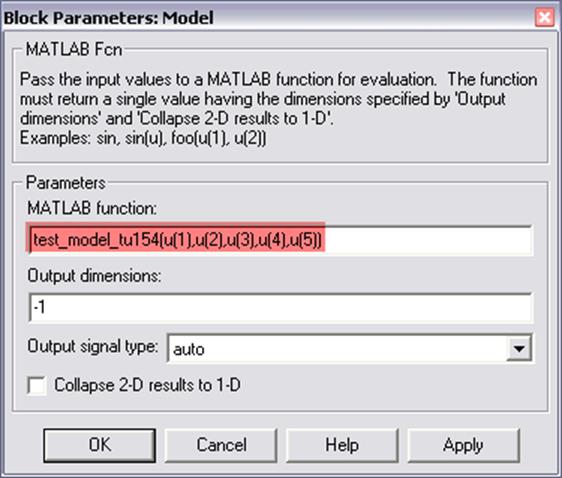
2. Блок обращения к функции Matlab,
|
|
|
Окно свойств блока Model |
В строке Matlab function содержится ссылка на m-file, содержащий функцию для решения правых частей дифференциального уравнения. Общий вид файла:
|
function y=test_model_tu154(x1,x2,x3,...xn, y) y1=f(x1,x2,x3,...xn) y2=f(x1,x2,x3,...xn) y3=f(x1,x2,x3,...xn) .... yn=f(x1,x2,x3,...xn) y=[y1 y2 y3...yn]; |
правые части диф. уравнений |
3. Сигнал выхода блока 2 интегрируется при помощи стандартного блока Integrator,
4. Результирующий сигнал блока 3 предается через обратные связи на вход блока 2,
5. Сигнал выхода
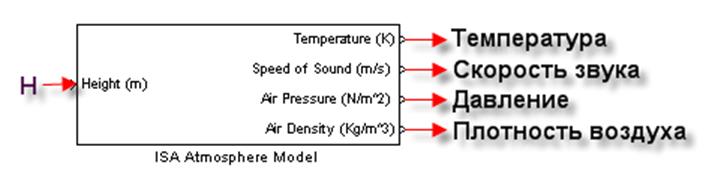
Для моделирования условий атмосферы используется блок ISA Atmosphere Model из библиотеки блоков Toolbox Aerospace Blockset.
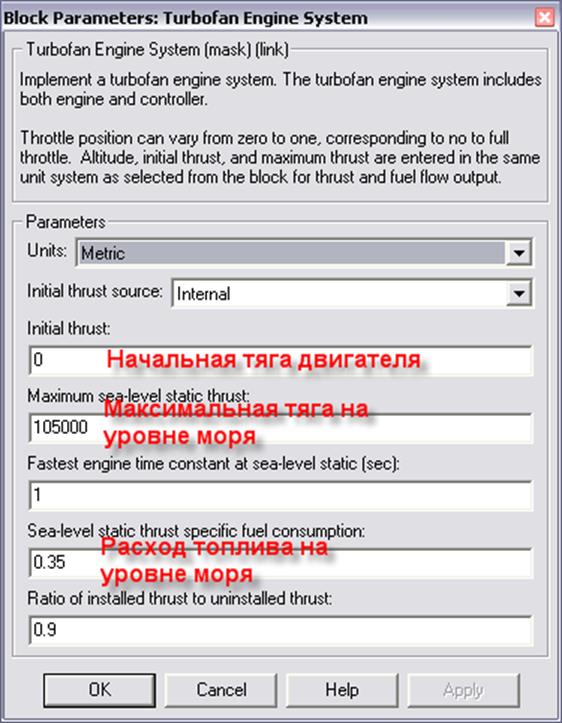
Для моделирования процесса работы двигателей используется блок Turbofan Engine System из библиотеки блоков Toolbox Aerospace Blockset.

Блок рассчитывает основные характеристики турбореактивных двигателей как функция от М,Н,P0,Ce0. Перед запуском моделирования требуется указать недостающие параметры двигателя.
- P0 Стартовая тяга двигателей.
- Ce0 Стартовый удельный расход топлива.
- Начальная тяга двигателя.
|
|
|
Окно свойств блока Turbofan Engine System |
При моделировании процесса захода на посадку используются все описанные выше методы. Для решения систем дифференциальных уравнений с переменными коэффициентами используется методика описанная в разделе 2.3.3. Тексты программ определяющие правые части дифференциальных уравнений приведены в Приложений 1
|
Блок |
Программа |
|
Model |
test_model_tu154 |
|
force |
force_tu154 |
|
traekt |
traekt |
|
ugol |
ugol_ckorost |
|
|
|
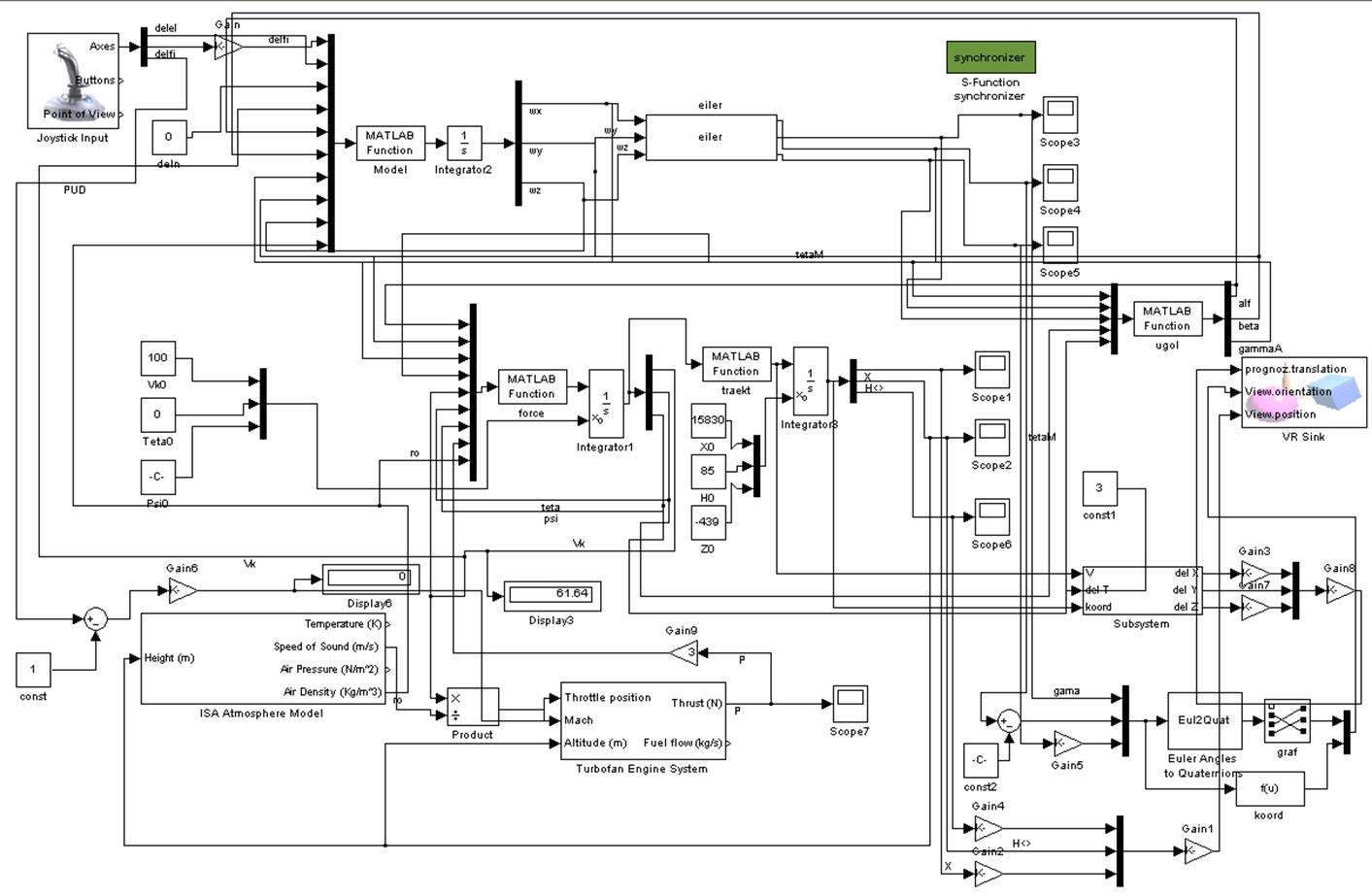
Схема модели самолета в системе Simulink |
Начиная с версии 6.5, Matlab предоставляет возможность подключения внешних устройств к модели Simulink.
Для подключения джойстика воспользуемся блоком Joystick Input пакета Virtual Reality toolbox. Блок позволяет подключать к модели установленные на компьютер манипуляторы ( один или несколько ). При работе блок использует набор драйверов поставляемых вместе с джойстиком.
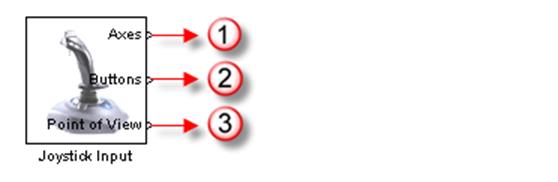
1. Нормализованный выход отклонения осей. Размерность сигнала зависит от используемого джойстика. Сигнал состоит из значений отклонения джойстика по 3 осям и отклонения РУД. Максимальное и минимальное значения сигнала равны 1 и -1 соответственно для каждого канала.
2. Передается сигнал о использовании кнопок. Размерность матрицы зависит от используемого джойстика. Передает 0 при отжатой кнопки 1 при нажатой , для каждого канала.
3. Используется для указания направления обзора камеры. Передает значение угла отклонения специального указателя на джойстике.
Одной из основных проблем имитационного моделирования является необходимость совпадения «реального» времени со временем выполнения расчетов. Данная проблема является основополагающей при моделировании процессов реально времени в пакете Simulink. Так как сам пакет не имеет инструментов для моделирования процессов в реальном времени, для решения этой задачи был создан специальных блок на основе инструмента S-function. Блок содержит откомпилированную программу написанную на языке С, и использует как возможности языка, так и специальные команды для управления процессом моделирования в Matlab.
Принцип действия блока заключается в том, что после запуска процесса моделирования встроенная программа сравнивает текущее имитационное время Simulink с машинным временем компьютера. В случае если имитационное время опережает машинное, программа приостанавливает вычисления на интервал равный разнице между машинным и текущем временем вычислений.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.