- Добавление прогноза приводить к улучшению точности пилотирования и снижению дисперсии ошибки в 10 раз.
Подводя итог можно принять за оптимальные следующие параметры: Расстояние между квадратами 150-200 метров – данная величина позволяет получить приемлемые результаты, как при прямолинейном полете, так и при заходе на посадку с большим радиусом разворота. Размер – в районе 7,5 метров.
5.3 Влияние предложенной системы на точность касания полосы.
В данном эксперименте не решается задача определения оптимальных параметров системы. Целью эксперимента является получение заключения о характере изменения точности касания в зависимости от используемой системы.
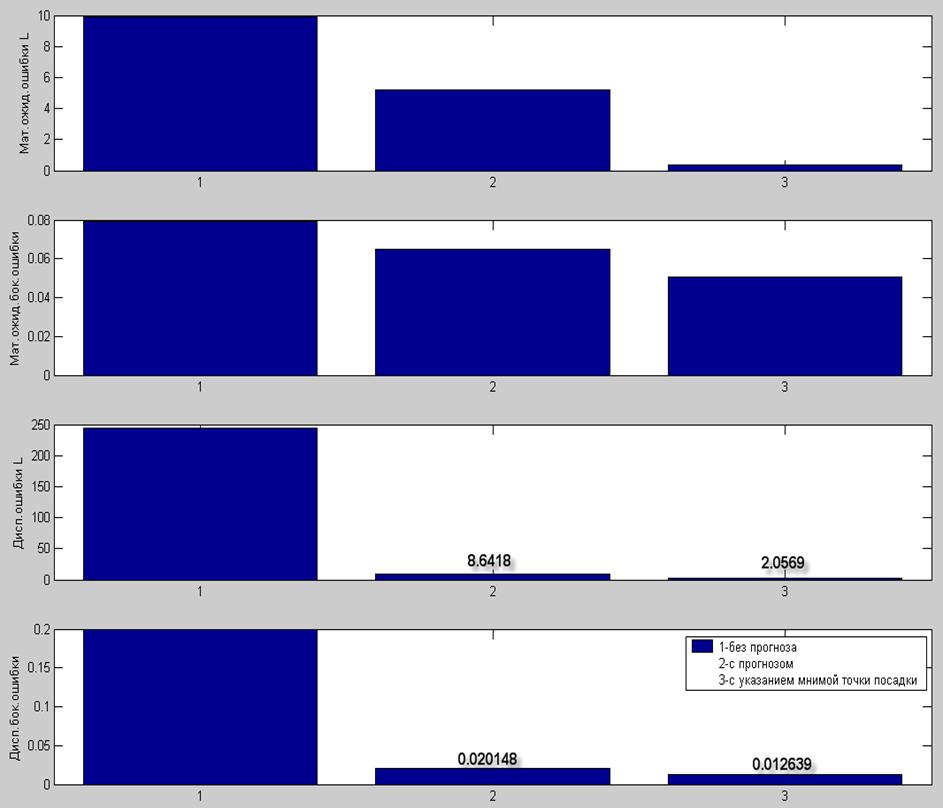
Постоим график зависимости математического ожидания и дисперсии ошибки относительно заданной точки касания для 3 расчетных режимов:
- без указания прогноза положения самолета, для радиуса разворота 20000 м, размер прямоугольников 7,5 , расстояние между ними 200 м.
- с указанием точки прогноза положения самолета на 3 с, для радиуса разворота 20000 м, размер прямоугольников 7,5 , расстояние между ними 200 м.
- с указанием мнимой точки посадки и прогноза положения самолета, для радиуса разворота 20000 м, размер прямоугольников 7,5 , расстояние между ними 200 м.
|
|
|
Радиус разворота 20000м, размер окон 7,5 м, расстояние 200 м |
Из полученных результатов видно что:
- Указание прогноза положения самолета позволяет существенно улучшить точность выполнения посадки, за счет общего увеличения точности пилотирования (дисперсия ошибки касания полосы уменьшается в 30 раз).
- Указание мнимой точки посадки позволяет почти в 4 раза увеличить точность касания полосы по сравнению с указанием только точки прогноза.
- Заход на посадку по криволинейной траектории позволяет обеспечить приемлемую точность приземления. Дисперсия ошибки касания полосы при заходе на посадку по криволинейной траектории с указанием прогноза положения самолета и мнимой точки касания примерно 2
Результатом проведенной работы стало создание системы, которая позволяет проводить исследования поведения самолета и летчика на этапе посадки самолета.
Был разработан и испытан принципиально новый метод отображения информации на этапе посадки, применение предложенной системы отображения информации на этапе посадки позволит.
- Значительно увеличит точность выполнения посадки. Точность пилотирования по прямолинейной траектории увеличивается примерно в 2 раза.
- Выполнять посадку на неманевренных самолетах по криволинейным траекториям. Точность пилотирования при этом сравнима с точностью пилотирования самолетом при заходе на посадку по прямой.
- Увеличить точность касания полосы примерно в 100 раз
- Увеличить безопасность на этапе посадки
- Снизить шумовые нагрузки на жилые районы за счет выбора траекторий захода на посадку.
В работе были рассчитаны оптимальные параметры системы индикации на этапе захода на посадку. Размер квадратов образующих полетный коридор равен 7,5 метров , расстояние между квадратами 150-200 м. Определены основные закономерности изменения точности пилотирования при использовании данной системы.
Проведение дополнительных исследований для оптимизации параметров системы отображения информации, позволит разработать систему пригодную для реальной эксплуатации.
Общеспециальная
часть
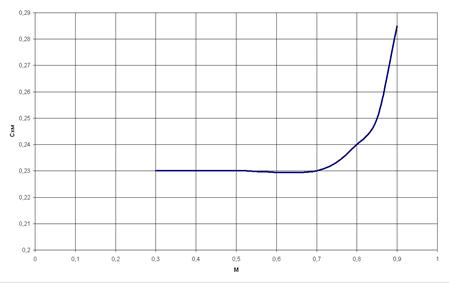
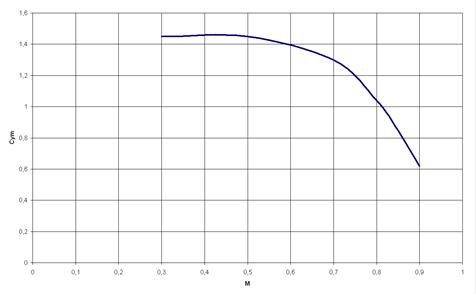
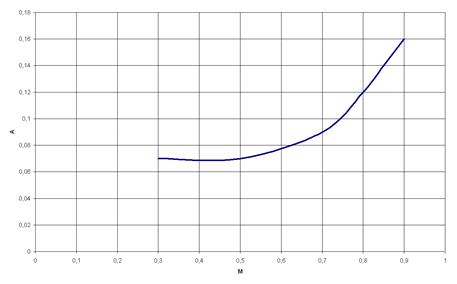
Исходные данные включают: проектные параметры самолета прототипа и ограничения режимов полета, аэродинамические характеристики, высотно-скоростные и дроссельные характеристики двигателей.
Для расчета ЛТХ самолета необходимы следующие характеристики: ![]() ,
, ![]() ,
, ![]() .
.
В линейном диапазоне аэродинамические характеристики самолета записываются в виде

где:
![]() - угол атаки самолета при
- угол атаки самолета при ![]() ,рад,
,рад,
![]() - минимальный коэффициент лобового
сопротивления,
- минимальный коэффициент лобового
сопротивления,
![]() - коэффициент подъемной силы при
- коэффициент подъемной силы при ![]()
![]() - коэффициент отвала поляры.
- коэффициент отвала поляры.
|
|
|
|
|
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.