![]() . (8.
14)
. (8.
14)
Аналогичным образом преобразована и ДПФ цифрового регулятора.
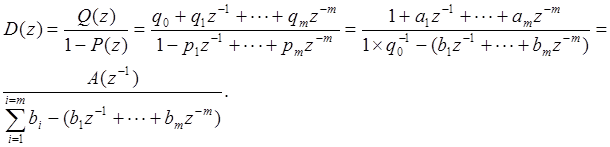
![]() (9. 14)
(9. 14)
Отметим, что в ДПФ компенсационного последовательно - включенного регулятора полином нулей принимается равным полиному полюсов ДПФ объекта C(z-1)=A(z-1)
Теперь, согласно работе [1)], запишем ДПФ структуры системы, изображенной на рис 7.14.
![]() (10. 14)
(10. 14)
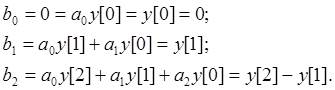
Расчеты по формуле (10. 14) выполняются при нулевых начальных условиях, поэтому принимают b0 = 0.
Если
![]() , то из первой формулы
(10. 14) найдем:
, то из первой формулы
(10. 14) найдем:
 (11.14)
(11.14)
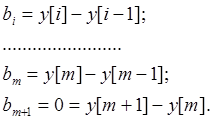
где у[i] - значения решетчатых функций на выходе замкнутой ДСАУ, причем у[0] = 0 и у[m] = 1, a!0 = 1 и a!1 = -1.
В самом деле, деля полином числителя на полином знаменателя в выражении (11.14), получим:
 (12.14.)
(12.14.)
Соответственно:
Откуда
![]() и т.д.
и т.д.
Таким образом, выбирая ДПФ F(z) согласно выражению (10.14), получаем на "m "интервалах апериодический переходныйпроцесс в ДСАУ.
Можно рассчитать и значения переходной функции u[i] на входе УМ (рис. 6. 14 и рис. 7. 14), т. е. на выходе регулятора. Тогда оперируем со второй формулой (10.14).

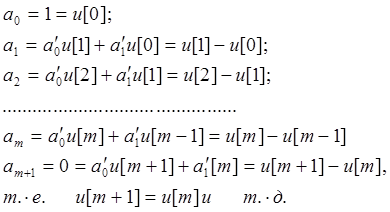 (13. 14)
(13. 14)
Если обозначить:
![]() ,
(14. 14)
,
(14. 14)
(напомним,
что финитный переходный процесс проходит при нулевых начальных условиях,
поэтому ![]() =0), а ДПФ по выходу U(z) принять:
=0), а ДПФ по выходу U(z) принять:
![]() .
(15. 14)
.
(15. 14)
Тогда получим:
![]() и
и ![]() .
(16. 14)
.
(16. 14)
Следовательно, первое выражение (16. 14) позволяет рассчитать коэффициенты pi и qi, зная обобщенные параметры объекта ai и bi, а второе - определяет вид ДПФ, параметры ФЦР и алгоритм его реализации. Исходя из условий (14. 14) - (16. 14), получим основную расчетную формулу для модели объекта ФДСАУ.
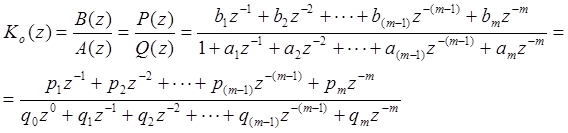 (17. 14)
(17. 14)
Поделив все слагаемые
полиномов P(z)
и Q(z) на ![]() , найдем такие соотношения для
параметров и коэффициентов:
, найдем такие соотношения для
параметров и коэффициентов:
![]() (18. 14)
(18. 14)
Таким образом, мы установили взаимосвязь коэффициентов pi и qi, и обобщенных параметров объекта ai и bi. Формулы (18. 14), совместно с уравнениями (12. 14) и (13. 14), позволяют установить и другие полезные и необходимые сведения.
Из систем уравнений (12.14) и (18. 14) установим:
Учитывая то, что y[0]=0, получим следующую зависимость:
![]() (19. 14)
(19. 14)
Аналогично можно поступить системами уравнений (13. 14) и (18. 14):
 (20. 14)
(20. 14)
Просуммируем коэффициенты полинома Q(z):
![]() +
+ .
(21. 14)*)
.
(21. 14)*)
Осталось определить значение
коэффициента ![]() :
:
 (22. 14)
(22. 14)
Теперь определим взаимосвязь параметров оптимального дискретного регулятора и объекта при финитном апериодическом управлении, рассчитанном по методике Джури и Шредера.
 (23. 14)
(23. 14)
Итак, соотношение (23. 14), в принципе, важно тем, что, зная параметры объекта, можно сразу же определить структуру и параметры оптимального финитного апериодического регулятора.
_____________________________________________________________________________
*) Это напоминание для тех студентов, которые так и не усвоили важность для повседной инженерной деятельности понимание сути простейшей теоремы "О начальном и конечном значениях функций" и не освоили умение её использовать. Я в курсе "Теория управления" уже показал не меньше сотни примеров полезности её применения, и в материалах этой лекции пользовался этой теоремой неоднократно. Что касается утверждения о плохом усвоении сути теоремы частью студентов? Это мнение складывается из анализа ответов на четырех (!!!) экзаменов по учебной дисциплине "Теория управления", просмотр части отчетов студентов по различным практическим работам и анализе докладов выпускников кафедры на ГЭК"ах" и ГАК"ах". Методических упущений по этому вопросу в курсе я не вижу. Поэтому готов выслушать и принять, с благодарностью, любые разумные советы и предложения (С. Ковчин).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.