Для систем с моделями 4 - го порядка соответствующие таблицы и формулы представлены в приложении 9 к материалам курса.
Для синтеза ДСАУ с экстраполяторами любого порядка и для моделей объектов без ограничений порядков пригодна методика синтеза по третьему способу реализации. Здесь важны знания о трех взаимосвязанных задачах (проблемах).
1. Задание при синтезе таких эталонных (желаемых) переходных функций hж(t), которые могут быть физически реализованы при заданных параметрах модели объекта.
2. Методика "усечения " порядка полиномиальных регуляторов.
3. Методика выбора оптимального значения
величины интервала квантования Т и взаимосвязи его с величиной
учитываемой наименьшей постоянной времени модели объекта τmin (![]() )? При большом Т можно
получить неустойчивую модель ДСАУ, а при малом Т нереализуемо
"длинный" полином регулятора и переход к аналоговым моделям.
)? При большом Т можно
получить неустойчивую модель ДСАУ, а при малом Т нереализуемо
"длинный" полином регулятора и переход к аналоговым моделям.
Поэтому в последующих лекциях будет изложен и другой метод синтеза ДСАУ.
6.8. Программная реализация корректирующих устройств
Метод z-преобразование позволяет получить очень простой и удобный способ программной реализации корректирующих устройств, регуляторов и других технических устройств, математические модели которых представлены в z-преобразованной форме.
Пусть синтезированный нами в предыдущем параграфе регулятор по форме (8.9)11 имеет такую ДПФ.
 (14. 9)
(14. 9)
![]() - изображение РФ выхода
корректирующего (программируемого) устройства,
- изображение РФ выхода
корректирующего (программируемого) устройства, ![]() -
то же для "входа" устройства.
-
то же для "входа" устройства.
Перепишем выражение (14. 9) в иной форме
![]()
При
переходе во временную область принимаем:![]() -
несмещенная РФ - оригинал
-
несмещенная РФ - оригинал ![]() .
Умножение
.
Умножение ![]() на z-k ,
соответствует сдвигу аргумента в области оригинала на " - к"
интервалов квантования (см. гл. 2, раздел 2. 4). Аналогичные правила относятся
и к
на z-k ,
соответствует сдвигу аргумента в области оригинала на " - к"
интервалов квантования (см. гл. 2, раздел 2. 4). Аналогичные правила относятся
и к ![]() . Все коэффициенты сi
и qi разделены (делятся) на q0, приобретая "верхний
индекс" - штрих сi! и qi!.
Тогда выражение (14. 9)* примет форму алгоритма программной реализации
вычислительного устройства во временной области (14. 9)
. Все коэффициенты сi
и qi разделены (делятся) на q0, приобретая "верхний
индекс" - штрих сi! и qi!.
Тогда выражение (14. 9)* примет форму алгоритма программной реализации
вычислительного устройства во временной области (14. 9)
![]()
![]() (14. 9)**
(14. 9)**
Этот алгоритм легко реализовать на любом промышленном контроллере (или ином вычислительном устройстве) и вычислить сумму времён всех элементарных операций умножений, сложений, (вычитаний) и переносов чисел из регистров в другой регистр, что и определит минимально необходимое время периода квантования Т в ДСАУ1). Упрощенная схема программируемого регулятора изображена на рис.3. 9
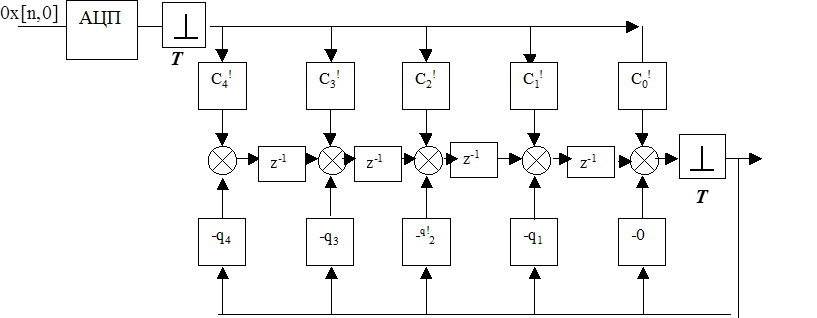 |
Рис.3.9.
Итак, с помощью z-преобразований легко решаются задачи исследования устойчивости и анализа, линейных ДСАУ, а так же программные реализации во временной области различных алгоритмов управления. Задачи синтеза систем пока разработаны недостаточно. Третий способ синтеза (при программной реализации процедур) сулит существенные выгоды времени его выполнения.
__________________________________________________________
1) Примечание. Впрочем, задачу программной реализации алгоритмов управления уже решали в курсе, читаемом А. Н. Щербиной или А. Л .Логиновым при изучении промышленных контроллеров. Однако программная реализация ПИД-регуляторов подчас вызывает затруднения у студентов. Поэтому я (С. Ковчин) добавил следующий раздел, не прочитанный в 2006/07 уч. году. В 90 - е годы этому практически важному вопросу в системе знаний уделялось 2 - 3 лекции.
6.9. Особенности программной реализация пропорционально - интегрально - дифференциальных (ПИД) регуляторов.
6. 9. 1.Исходные положения
Обычно различают конструирование дискретных регуляторов при малых и больших интервалах квантования и различных способах интегрирования. Кроме того, напомним, что есть компенсационные регуляторы и регуляторы состояния. Последних регуляторов не будем касаться.
Для ЭМС (из - за малых постоянных времени объекта, измеряемых миллисекундами и сотыми и десятыми долями секунды) можно использовать малые интервалы квантования и настройки дискретного регулятора выполнять по настройкам аналогового прототипа, если таковой имеется.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.