Пример 2. Пусть ЛЧ исследуемой НСАУ имеет такие же данные, как в Примере 1, но является астатической, то есть:
![]() Примем:
Примем: ![]() .
.
Cоставим ![]()
Здесь вычислено:![]()
![]()
![]() . Итак, здесь одно неизвестное а3..
Составим для (ЛСАУ) Фл(р) определитель Гурвица и найдем
предельное значение а3пр, которое "выводит" ЛСАУ на
границу устойчивости. Это будет:
. Итак, здесь одно неизвестное а3..
Составим для (ЛСАУ) Фл(р) определитель Гурвица и найдем
предельное значение а3пр, которое "выводит" ЛСАУ на
границу устойчивости. Это будет:
Δг= . Отсюда имеем
. Отсюда имеем ![]() Получили: а3пр=0,6,
rпр=0.06.
Очевидно, такое значение неприемлемо, поскольку оно является предельно большим.
Поэтому окончательно выберем r = 0.05.
Получили: а3пр=0,6,
rпр=0.06.
Очевидно, такое значение неприемлемо, поскольку оно является предельно большим.
Поэтому окончательно выберем r = 0.05.
Это были этапы предварительных расчетов. Только теперь и начинается исследование устойчивости модели НСАУ.
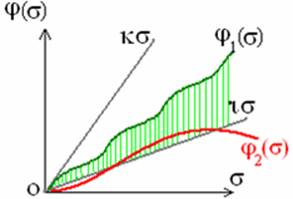
1. Найдем видоизмененную нелинейность ![]() . Она изображена в виде
"зеленой" кривой на рис. ниже. Её сектор теперь ограничен лучами κσ и rσ (а не лучем κσ
и осью абсцисс, как в исходной
системе). Теперь "угол"
будет отсчитываться в новой декартовой системе координат, для которой осью
абсцисс является луч rσ. Значение
коэффициента "к" в
новой системе координат будет:
. Она изображена в виде
"зеленой" кривой на рис. ниже. Её сектор теперь ограничен лучами κσ и rσ (а не лучем κσ
и осью абсцисс, как в исходной
системе). Теперь "угол"
будет отсчитываться в новой декартовой системе координат, для которой осью
абсцисс является луч rσ. Значение
коэффициента "к" в
новой системе координат будет: ![]() .
.
|
2.
На плоскости АФЧХ разомкнутой системы проводим вертикаль |
|
Строим АФХ эквивалентной системы ![]() :
:
 .
(Пример 1, при k=
10). Тогда при
ω = 0 кривая АФХ K1(jω)начинается в точке вещественной оси +10. Начальное
значение эквивалентной АФХ астатической системы
.
(Пример 1, при k=
10). Тогда при
ω = 0 кривая АФХ K1(jω)начинается в точке вещественной оси +10. Начальное
значение эквивалентной АФХ астатической системы ![]() будет равно
будет равно  .
(Пример 2, при k1 =
10).
.
(Пример 2, при k1 =
10).
Итак, годограф ![]() начинается в точке в два раза
более удаленной, чем годограф статической системы. Поэтому и при частоте
начинается в точке в два раза
более удаленной, чем годограф статической системы. Поэтому и при частоте ![]() годограф
годограф ![]() пройдет левее вертикали
пройдет левее вертикали
![]() . Следовательно, в модели ЛЧ
коэффициент передачи можно уменьшить (например, взять k1=5,0), тогда r = 0,1.
Характеристики K1(jω) и
. Следовательно, в модели ЛЧ
коэффициент передачи можно уменьшить (например, взять k1=5,0), тогда r = 0,1.
Характеристики K1(jω) и ![]() начинаются в одной точке, но
вертикаль
начинаются в одной точке, но
вертикаль ![]() существенно левее
существенно левее ![]() .
.
Вывод. При заданных параметрах нелинейности и астатической ЛЧ данная нелинейная САУ неустойчива абсолютно в классе "0 – к".
Диссипативность и её использование для улучшения частотных условий абсолютной устойчивости
|
|
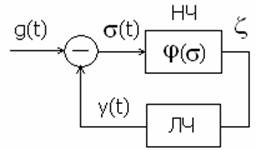
Для модели НСАУ запишем уравнение ЛЧ в виде:
Если
матрица Н гурвицева и нелинейность |
 , тогда модель НСАУ диссипативна.
, тогда модель НСАУ диссипативна.
При этом можно будет выбрать такое условие:
![]() .
.
Критерий абсолютной устойчивости НСАУ В.М. Пòпова
Румынский ученый Василь
Михай Пòпов в 1960
предложил свой вариант частотного критерия абсолютной устойчивости НСАУ с
нелинейностью F(σ), принадлежащей к классу "0 - К". Локальная связь, в отличие от
кругового критерия устойчивости Якубовича, здесь характеризуется
неравенством ![]() ,
,
Подобно теореме Лурье критерий Попова позволяет установить устойчивость нелинейной системы сразу для целого класса нелинейности, лежащих в секторе.
Пусть нелинейность F(σ) удовлетворяет частному условию:
![]() ,
, ![]() .
.
То есть нелинейность не выходит за рамки сектора в I и III квадрантах, при этом её конкретный вид не имеет значения, например, она может иметь вид петли или быть сильно ломаной.
Понятно, что требования к виду нелинейности очень слабы, поэтому к данному классу нелинейностей относятся такие нелинейности, которые не поддаются обычным методам линеаризации вследствие недифференцируемости. Класс нелинейностей, умещающихся в секторе, очень широк, например, сюда относится большинство нелинейностей датчиков и приводов.
С другой стороны, сюда не попадает, например, обычное реле с гистерезисом.
Абсолютная устойчивость – это устойчивость для любой нелинейности внутри заданного сектора.
Устойчивость в целом(пространстве) – это устойчивость при любом начальном условии.
Устойчивость в целом является развитием вполне интуитивно понятной инженеру идеи: если график нелинейности F(σ) зажат границами сектора kσ, то коэффициент усиления нелинейности не "превышает k", и, если устойчива линейная система, в которой вместо F(σ) стоит kσ, то должна быть устойчива и нелинейная система. Но для проверки устойчивости линейной системы можно использовать обычные критерии устойчивости, например, частотные.
Именно частотный подход используется в критерии Попова.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.