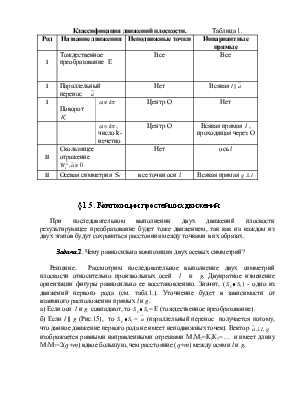
Классификация движений плоскости. Таблица 1.
|
Род |
Название движения |
Неподвижные точки |
Инвариантные прямые |
|
|
I |
Тождественное преобразование Е |
Все |
Все |
|
|
I |
Параллельный перенос
|
Нет |
Всякая |
|
|
I |
Поворот |
|
Центр О |
Нет |
|
|
Центр О |
Всякая прямая l, проходящая через О |
||
|
II |
Скользящее отражение
|
Нет |
ось l |
|
|
II |
Осевая симметрия Sl |
все точки оси l |
Всякая прямая |
|
§ 1.5. Композиции простейших движений
При последовательном выполнении двух движений плоскости результирующее преобразование будет тоже движением, так как на каждом из двух этапов будут сохраняться расстояния между точками в их образах.
Задача 1. Чему равносильна композиция двух осевых симметрий?
Решение. Рассмотрим последовательное выполнение двух симметрий плоскости
относительно произвольных осей l и g. Двукратное изменение ориентации фигуры равносильно ее
восстановлению. Значит, (![]() ) - одно из
движений первого рода (см. табл.1.). Уточнение будет в зависимости от взаимного
расположения прямых l и g.
) - одно из
движений первого рода (см. табл.1.). Уточнение будет в зависимости от взаимного
расположения прямых l и g.
а)
Если оси l и g совпадают, то ![]() =
Е (тождественное преобразование).
=
Е (тождественное преобразование).
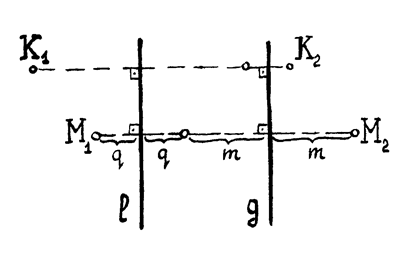
б)
Если l || g (Рис.15), то ![]() =
=
![]() (параллельный перенос
получается потому, что данное движение первого рода не имеет неподвижных
точек). Вектор
(параллельный перенос
получается потому, что данное движение первого рода не имеет неподвижных
точек). Вектор ![]()
изображается равными направленными отрезками М1М2=К1К2=… и имеет длину М1М2=2(q+m) вдвое большую, чем расстояние (q+m) между осями l и g.
|
Рис.15 |
Рис.16 |
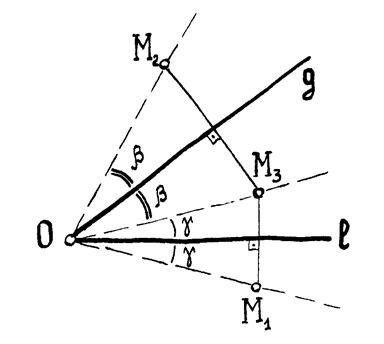
в)
Если l∩g=0, (Рис.16), то движение ![]() имеет
ровно одну неподвижную точку О. Значит, оно является поворотом
имеет
ровно одну неподвижную точку О. Значит, оно является поворотом ![]() вокруг точки О пересечения осей
l и g Угол
вокруг точки О пересечения осей
l и g Угол ![]() в два раза больше
угла между осями
в два раза больше
угла между осями ![]() .
.
Композиция двух осевых симметрий равносильна либо тождественному преобразованию, либо параллельному переносу, либо повороту плоскости (в зависимости от взаимного расположения осей).
Замечание. Всякое движение первого рода удастся представить в виде композиции двух осевых симметрий.
Действительно, любое движение D1 может быть (см. табл.1.) либо тождественным преобразованием, либо поворотом, либо параллельным переносом. В каждом из рассмотренных в задаче 1 случаях а), б), в) композиции двух симметрий можно воссоздать искусственно. При этом одну из осей (например, ось l) можно назначить произвольно, удовлетворяя одному из условий:
а) для тождественного преобразования оси l и g должны быть совпадающими;
б) для поворота ось l должна пройти через точку О, предлагаемую в
качестве центра поворота. Тогда прямую g проведем через О под углом ![]() /2 к оси l (в нужном
направлении);
/2 к оси l (в нужном
направлении);
Примечание: если отложить угол ![]() /2 «не в ту
сторону», то результирующий поворот изменит направление. в) для параллельного переноса
/2 «не в ту
сторону», то результирующий поворот изменит направление. в) для параллельного переноса ![]() построим ось
построим ось![]() l
l ![]()
![]() (под
прямым углом к направлению требуемого вектора). Тогда вторая ось ось g
проводится единственным образом параллельно l на расстоянии
(под
прямым углом к направлению требуемого вектора). Тогда вторая ось ось g
проводится единственным образом параллельно l на расстоянии ![]() /2 (с учетом направления переноса).
/2 (с учетом направления переноса).
Теорема. Всякое движение плоскости можно представить в виде не более трех осевых симметрий.
Для доказательства остается рассмотреть движение второго рода, которое (см.
табл.1.) равносильно скользящему отражению ![]() .
Представляя параллельный перенос
.
Представляя параллельный перенос ![]() двумя
симметриями, получаем нужный результат.
двумя
симметриями, получаем нужный результат.
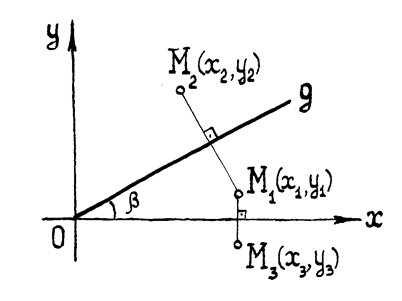
Пример. Вывести формулы пересчета координат точек при симметрии относительно произвольной оси g, проходящей через начало координат под углом β к горизонтальной оси Ох .
Решение. Симметрия относительно оси Ох ранее была описана системой (1). Пусть теперь при симметрии относительно “наклонной” оси gпроизвольная точка М1(х1, у1) отобразилась в М2(х2, у2) (Рис.17). Обозначим ось Ох через l и рассмот-
|
Рис.17 |
рим
композицию
Цель этого приема в том, чтобы исключить композицию Sl
|
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.