143 0,3512 0,1075 -0,0037 0,0020
144 0,3460 0,1059 -0,0036 0,0019
145 0,3408 0,1043 -0,0035 0,0019
146 0,3358 0,1028 -0,0035 0,0019
147 0,3308 0,1013 -0,0034 0,0019
148 0,3258 0,0997 -0,0034 0,0019
149 0,3210 0,0983 -0,0033 0,0019
150 0,3162 0,0968 -0,0033 0,0019
151 0,3115 0,0954 -0,0032 0,0019
152 0,3069 0,0939 -0,0032 0,0018
153 0,3023 0,0925 -0,0031 0,0018
154 0,2978 0,0912 -0,0031 0,0018
155 0,2934 0,0898 -0,0030 0,0018
156 0,2890 0,0885 -0,0030 0,0018
157 0,2847 0,0871 -0,0030 0,0018
158 0,2804 0,0858 -0,0029 0,0018
159 0,2763 0,0846 -0,0029 0,0018
160 0,2722 0,0833 -0,0028 0,0018
161 0,2681 0,0821 -0,0028 0,0017
162 0,2641 0,0809 -0,0027 0,0017
163 0,2602 0,0796 -0,0027 0,0017
164 0,2563 0,0785 -0,0027 0,0017
165 0,2525 0,0773 -0,0026 0,0017
166 0,2487 0,0761 -0,0026 0,0017
167 0,2450 0,0750 -0,0025 0,0017
168 0,2414 0,0739 -0,0025 0,0017
169 0,2378 0,0728 -0,0025 0,0017
170 0,2342 0,0717 -0,0024 0,0016
171 0,2308 0,0706 -0,0024 0,0016
172 0,2273 0,0696 -0,0024 0,0016
173 0,2239 0,0686 -0,0023 0,0016
174 0,2206 0,0675 -0,0023 0,0016
175 0,2173 0,0665 -0,0023 0,0016
176 0,2141 0,0655 -0,0022 0,0016
177 0,2109 0,0646 -0,0022 0,0016
178 0,2078 0,0636 -0,0022 0,0016
179 0,2047 0,0627 -0,0021 0,0016
180 0,2016 0,0617 -0,0021 0,0016
181 0,1986 0,0608 -0,0021 0,0015
182 0,1957 0,0599 -0,0020 0,0015
183 0,1927 0,0590 -0,0020 0,0015
184 0,1899 0,0581 -0,0020 0,0015
185 0,1870 0,0573 -0,0019 0,0015
186 0,1843 0,0564 -0,0019 0,0015
187 0,1815 0,0556 -0,0019 0,0015
188 0,1788 0,0547 -0,0019 0,0015
189 0,1762 0,0539 -0,0018 0,0015
190 0,1735 0,0531 -0,0018 0,0015
191 0,1709 0,0523 -0,0018 0,0015
192 0,1684 0,0516 -0,0018 0,0015
193 0,1659 0,0508 -0,0017 0,0015
194 0,1634 0,0500 -0,0017 0,0014
195 0,1610 0,0493 -0,0017 0,0014
196 0,1586 0,0486 -0,0016 0,0014
197 0,1562 0,0478 -0,0016 0,0014
198 0,1539 0,0471 -0,0016 0,0014
199 0,1516 0,0464 -0,0016 0,0014
*******************************************************************
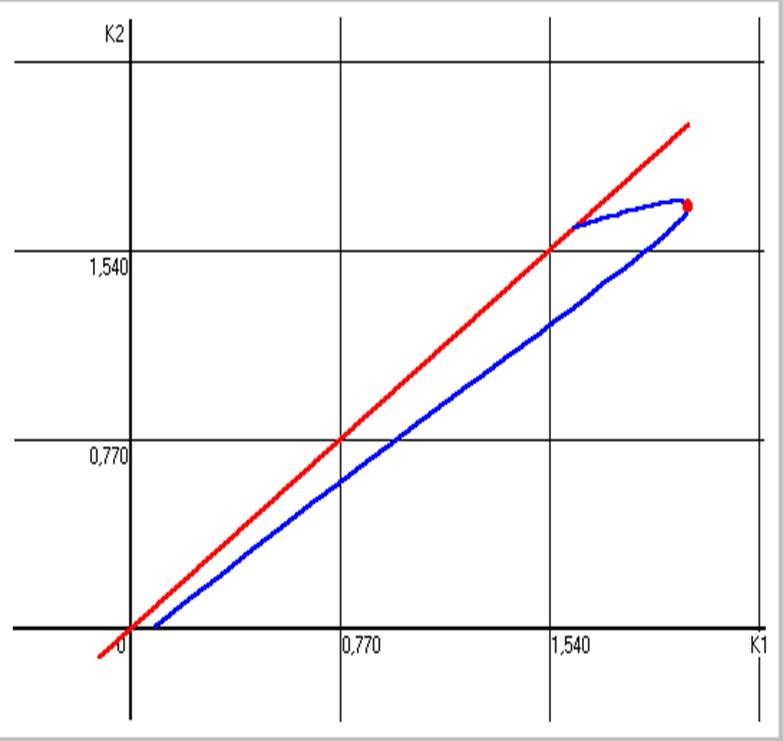
Линия равного запаса устойчивости
![]()
![]()
K1опт =2.0498; K2опт = 1.7168;
Таблица 1. Качественные и количественные характеристики системы при изменении задающего воздействия и оптимальных значениях настроек регулятора линейной дискретной системы управления.
|
Задающее воздействие |
Установив состояние ∆Y∞ |
Статическ ошибка ∆Е∞ |
Время переходного процесса |
Время регулирования |
Перерегулирование σ |
Затухание за период ξ |
Средний квадрат ошибки за время 30 T |
|
-0,5[t] |
-0,5 |
0 |
900с |
360 |
34,8 |
98,6 |
0,0460 |
Таблица 2. Качественные и количественные характеристики системы при изменении задающего воздействия и оптимальных значениях настроек регулятора нелинейной дискретной системы управления.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.