















































Задача автоматического регулирования.
В этих примерах решается задача автоматического регулирования.
Процесс поддержания этой величины постоянной или изменяющейся по определённому закону является процессом регулирования.
Объект регулирования. Регулируемая величина. Уставка и регулятор.
В первом примере объектом регулирования является регулятор, во втором – закалочная печь, в третьем – угол поворота зенитного орудия.
Объектом регулирования является такое устройство, выходной параметр которого требуется поддерживать определённым образом.
Регулируемой величиной называется выходная координата системы, которую требуется изменять определённым образом.
Значение регулируемой величины наперед заданное – установленная величина (Уставка).
Процесс поддержания регулируемой величины её установленным значением осуществляется с помощью специальных устройств называемых регуляторами.
При этом совокупность регулятора и объекта образуют автоматическую систему.
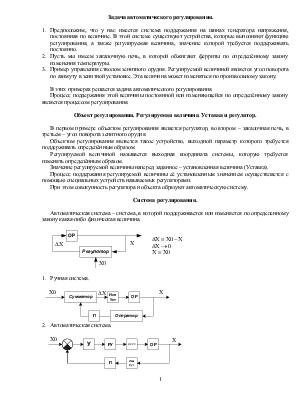
Система регулирования.
Автоматическая система – система, в которой поддерживается или изменяется по определенному закону какая-либо физическая величина.
![]()
![]()
![]()
1. Ручная система.
2. Автоматическая система.
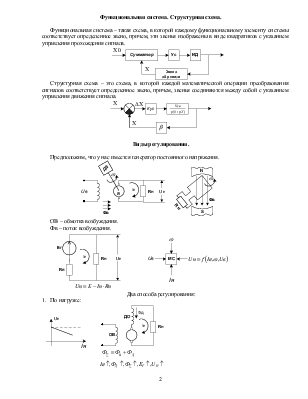
Функциональная система. Структурная схема.
Функциональная система – такая схема, в которой каждому функциональному элементу системы соответствует определенное звено, причем, эти звенья изображены в виде квадратиков с указанием управления прохождения сигнала.
Структурная схема – это схема, в которой каждой математической операции преобразования сигналов соответствует определенное звено, причем, звенья соединяются между собой с указанием управления движения сигнала.
Виды регулирования.
Предположим, что у нас имеется генератор постоянного напряжения.
ОВ – обмотка возбуждения.
Фв – поток возбуждения.
Два способа регулирования:
1. По нагрузке:
Способ регулирования по нагрузке удобен тем, что он относительно прост и не требует относительных средств, позволяет устранить полностью влияние нестабильных факторов.
Недостатки: если нестабильных факторов много, то возрастает сложность дополнительной аппаратуры. Компенсация происходит только теоретически. На самом же деле точной компенсации нет, т.к. система нелинейная.
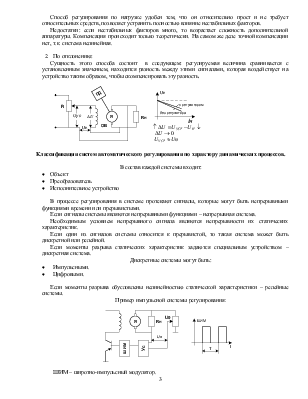
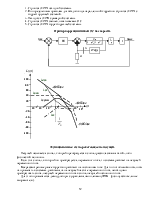
2. По отклонению:
Сущность этого способа состоит в следующем: регулируемая величина сравнивается с установленным значением, находится разность между этими сигналами, которая воздействует на устройство таким образом, чтобы скомпенсировать эту разность.
Классификация систем автоматического регулирования по характеру динамических процессов.
В состав каждой системы входит:
В процессе регулирования в системе протекают сигналы, которые могут быть непрерывными функциями времени или прерывистыми.
Если сигналы системы являются непрерывными функциями – непрерывная система.
Необходимым условием непрерывного сигнала являются непрерывности их статических характеристик.
Если один из сигналов системы относится к прерывистой, то такая система может быть дискретной или релейной.
Если моменты разрыва статических характеристик задаются специальным устройством – дискретная система.
Дискретные системы могут быть:
· Импульсными.
· Цифровыми.
Если моменты разрыва обусловлены нелинейностью статической характеристики – релейные системы.
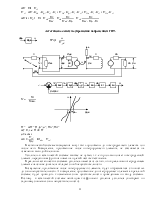
Пример импульсной системы регулирования:
ШИМ – широтно-импульсный модулятор.
Пример релейной системы регулирования:
ФЧВ – фазо-частотный вращатель.
ТЭН – тепло- электронный нагреватель.
ФЧВ
Классификация систем по виду уставка.
В зависимости от того, какой вид имеет уставка системы можно классифицировать:
1. Автоматическая стабилизация.
2. Если величина уставки наперед изменяется по установленному закону – система с программным управлением.
![]()
3. Если Х0 изменяется по произвольному закону – следящая система.
![]()
Классификация систем по виду уравнений, описывающих динамику процесса регулирования.
Линейные системы – системы, которые описываются линейными алгебраическими, дифференциальными или интегральными уравнениями.
Нелинейные системы – системы, объекты которых имеют хотя бы одно звено с нелинейной статической характеристикой.
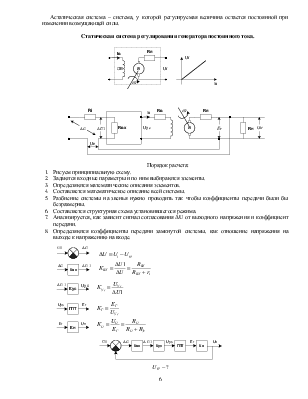
Статика систем автоматического регулирования.
Под статикой систем автоматического регулирования понимается режим установившегося значения выходной координаты системы.
В установившемся режиме различают:
1. Статические системы регулирования.
2. Астатические системы регулирования.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.