Значения результирующего коэффициента Сп для конвейеров на подшипниках качения.
|
Тип конвейера |
Сп·10-2 |
|
Канатная дорога |
0,6-0,7 |
|
Ленточные и цепные конвейеры |
2,0-2,5 |
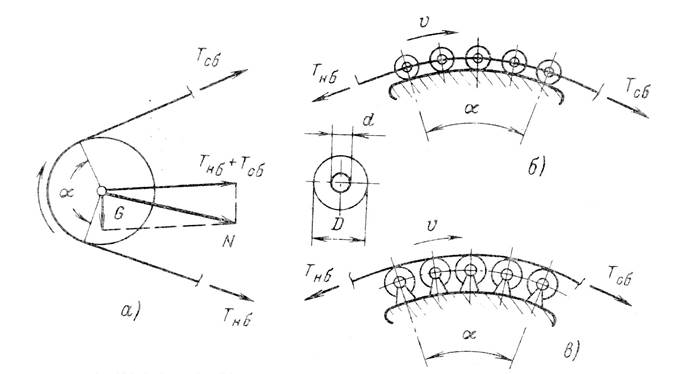
Рис. 7. Участки изгиба тягового элемента на блоке (а), шине (б) и батарее роликов (в).
На участках изгиба (рис. 7) сила сопротивления движению ΔFи состоит из двух слагаемых: силы от изгиба тягового элемента, пропорциональной натяжению в набегающей точке участка Тнб и сила трения в подшипниках блоков или роликов, пропорциональной равнодействующей силе N на участке. Следовательно,
ΔFи
= εTнб
+ Nμd![]() D,
(15) где ε–
коэффициент сопротивления от изгиба тягового элемента.
D,
(15) где ε–
коэффициент сопротивления от изгиба тягового элемента.
В конвейерных установок обычно выполняются условия:
Tнб >> Cs (рис.7);
ΔFи << Tнб.
Поэтому при определении равнодействующей N можно пренебречь весом блока Cs и принять, что натяжения в набегающей Тнб и сбегающей Тсб точках участка равны. Тогда выражение (15) приводится к виду:
ΔFи ≈ СиТнб,
d d
![]() где
Си = ε
+ 2μ sin
– результирующий коэффициент сопро-
где
Си = ε
+ 2μ sin
– результирующий коэффициент сопро-
D 2
тивления на участке изгиба. Значения коэффициента Си для различных конструктивных исполнений тягового элемента конвейера приведены в таблице 2.
Таблица 2.
Значения результирующего коэффициента сопротивления движению Сп на участках изгиба трассы конвейера.
|
Вид участка изгиба трассы |
№ рисунка |
Угол обхва- та α |
Сп·10-2 |
|
Звездочка с цепью и шкив с канатом |
7,а |
90-180о |
2-3 |
|
Барабан с лентой |
7,а |
90-180о |
4-6 |
|
Цепь с катками на шине |
7,б |
20-45о |
1,2-3 |
|
Лента на роликовой батарее |
7,б |
20-45о |
1,2-3 |
|
Цепь на роликовой батарее |
7,в |
30-60 о |
2,5-3,7 |
Сила сопротивления вызывает увеличение натяжения тягового элемента на каждом участке.
Для прямолинейного участка:
Тсб = Тнб + ΔFп , (17) для участка изгиба:
Тсб = Тнб + ΔFи = КиТнб, (18)
гдеKи =1+ Си– коэффициент увеличения натяжения на данном участке.
Рис. 8. Общая схема конвейерной линии.
В общем случае конвейер может состоять из многих участков (рис. 8). Поскольку прямолинейные участки отделяются друг от друга участками изгиба, то по всей замкнутой конвейерной линии имеется одинаковое число n прямолинейных и криволинейных участков.
Таким образом, результирующая сила сопротивления движению определяется как сумма сил всех участков:
n n n n
Fст =∑ΔFпi +∑ ∑ΔFиi = qili(Cп cosβi +sinβi )+∑CиiTнбi , (19)
i=1 i=1 i=1 i=1
Так как силу Fcт должен преодолеть приводной элемент, то очевидно, что при установившемся движении разность натяжений на нем уравновешивается силой сопротивления:
Fст = Тнб −Tсб, (20)
Второе слагаемое в (19) зависит от натяжения, по этому для расчета Fcт необходимо последовательно определять натяжения на всех участках. При этом должно быть известно заранее натяжение в какой либо точке тягового органа, которое и принимается за исходную в расчете. Допустим, что нам известно место расположение приводного элемента и натяжение на его сбегающей точке. Следуя от этой точки по направлению движения тягового элемента, пронумеруем все прямолинейные участки П и участки изгиба И, как это показано на рис. 8. В соответствии с (19) и рис. 8, определив последовательно натяжения на входе участков изгиба, выразим Tнб на приводном элементе через исходно принятое значение Тсб:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.