В конкретных условиях для многих конвейеров задача по определению местоположения приводной станции решается просто и однозначно без предварительных расчетов. Так, для ленточных и канатных конвейеров, выполняемых обычно в односекционном варианте и имеющих одну рабочую (прямую) и одну холостую (обратную) ветви, привод располагается в конце рабочей ветви. При этом выполняется сформулированное выше условие в отношении натяжений тягового органа.
1. Типы конвейеров.
2. Требования, предъявляемые к электроприводам конвейеров.
3. Основные схемы электроприводов, используемых в конвейерных линиях.
4. Схема узла контроля пуска конвейера.
5. Особенности двигателей, применяемых в конвейерах.
6. Обеспечение плавности пуска мощных конвейеров.
7. Решение проблемы согласованного движения конвейеров, входящих в единый производственный процесс.
8. Исключение завалов перегрузочных устройств в многосекционном ленточном конвейере.
9. Защитные блокировки в схемах автоматизации конвейерных линий.
10.Определение месторасположения приводной станции конвейера.
Для конвейера, расчетная схема которого представлены на рис. 9, требуется рассчитать мощность приводной станции, выбрать двигатель и редуктор.
Технические данные конвейерной линии приведены в Приложении 2.
Для всех вариантов диаметр приводного барабанаDп = 0,8 м.
Технические данные конвейера: производительность
П = 80000 кг/ч; скорость υ = 0,9 м/с; масса одного метра ленты mo* =10 кг/м; углы обхвата приводного барабана αп = 210o и натяж-
ного барабана αн =180o; длины и углы наклона к горизонту l12 = 0,8 м; l 34 = 90 м; l 56 = 88 м; l 78 = 3 м; β34 = β56 =15o; β12 = −30o; β78 = 0; допускаемое ускорение aдоп = 0,5 м/с2 .
Согласно табл. 1 – 4 принимаем значения коэффициентов трения, сопротивления движению μ = 0,1; Сп = 0,025;
Ки1 =1+ Си2 =1,05; Ки3 =1+ Си3 =1,02; Ки4 =1+ Си4 =1,05.
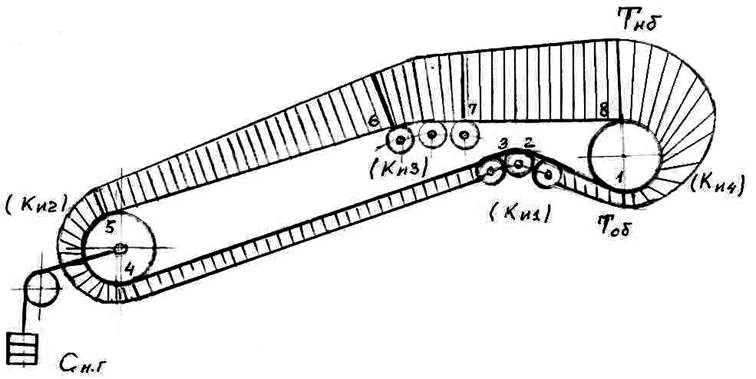
Рис. 9. Эпюра натяжения ленточного конвейера.
1. Масса 1 м транспортируемого груза в соответствии с заданной производительностью
![]() П 80000
П 80000
![]() m= = 24,9
кг/м
m= = 24,9
кг/м
3600υ 3600⋅0,9
2. Находим массы участков конвейера:
m![]() кг;
m
кг;
m![]() кг;
кг;
m![]() кг;
m
кг;
m![]() кг;
кг;
3. Расчетная суммарная масса (30)
m∑' = m78 + m56 Ки3 + m34 Ки3Ки2 + m12 Ки3Ки2Ки1 =
=104,7 + 3071⋅1,02 + 900⋅1,02⋅1,05+8⋅1,02⋅1,05⋅1,02 = 4209 кг
4. В соответствии с (14) рассчитываются силы сопротивления движению на прямолинейных участках:
ΔF12 = q0l12 (Cп ⋅cosβ12 −sinβ12 ) = 9,81⋅8⋅(0,025⋅0,87 + 0,5) =
= 41H;
ΔF34 = q0⋅l 34 (Cп cosβ34 −sinβ34 ) = 9,81⋅900⋅(0,025⋅0,97 − 0,26) =
= −2081,4 H;
ΔF56 = (q0 + q1 )l 56 (Cп cosβ56 −sinβ56 ) =
= 9,81⋅3071⋅(0,025⋅0,97 + 0,26) = 8563,5 H;
ΔF78 = 9,81⋅104,7⋅0,025 = 25,68 H;
5. Расчетное результирующее усилие на прямолинейных участках трассы (23):
Fп' = ΔF78 + ΔF56Kи3 + ΔF34Kи3Ки2 + ΔF12Kи3Ки2Ки1 = 25,68+
+8563,5⋅1,02 − 2081,4⋅1,02⋅1,05+ 41⋅1,02⋅1,05⋅1,02 = 6576 H;
Найденные значения m∑' и Fп' позволяют рассчитать по (31) минимально допустимое натяжение в точке сбегания ленты с приводного барабана
Fп' + m∑' aдоп 6576 + 4209⋅0,5
![]() Тсбmin = μα = 0,1⋅3,66 = 24965 H
Тсбmin = μα = 0,1⋅3,66 = 24965 H
е − Ки1Ки2Ки3 е −1,02⋅1,05⋅1,02
Так как при определении m∑' не учитывались массы барабанов, опорных роликов, ротора двигателя, то Тсб следует принять с некоторым запасом относительно значения Тсбmin
Tсб ≈1,2Тсбmin =1,2⋅24965 = 29958 Н
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.