По способу связи с сетью - с реакторным подключением.
Снабжён тиристорным возбудителем с номинальным током 0,5А, номинальным напряжением 220 В.
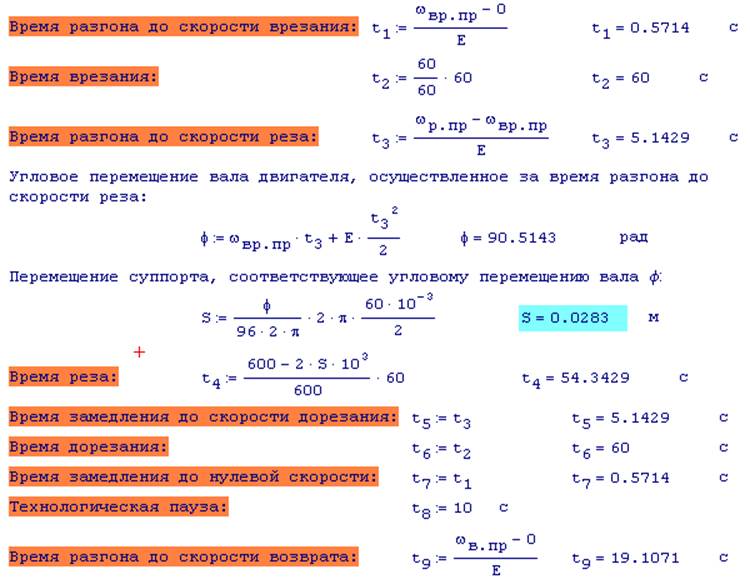
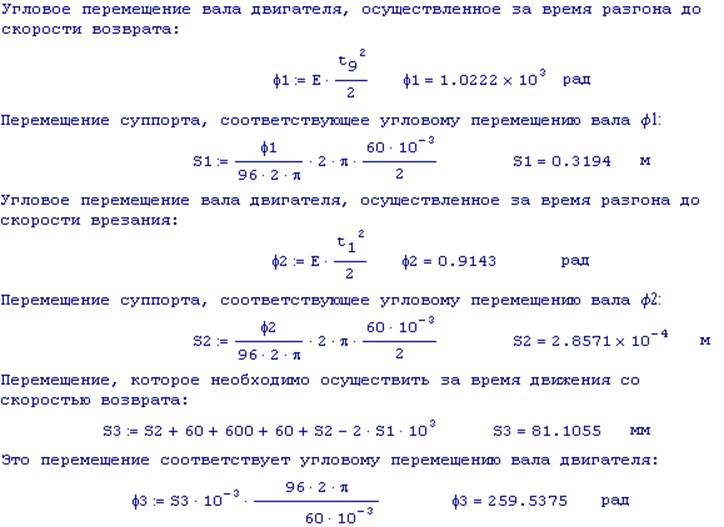
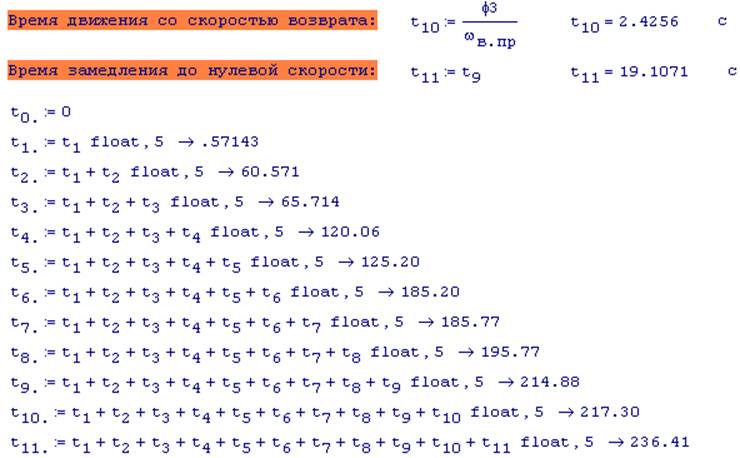
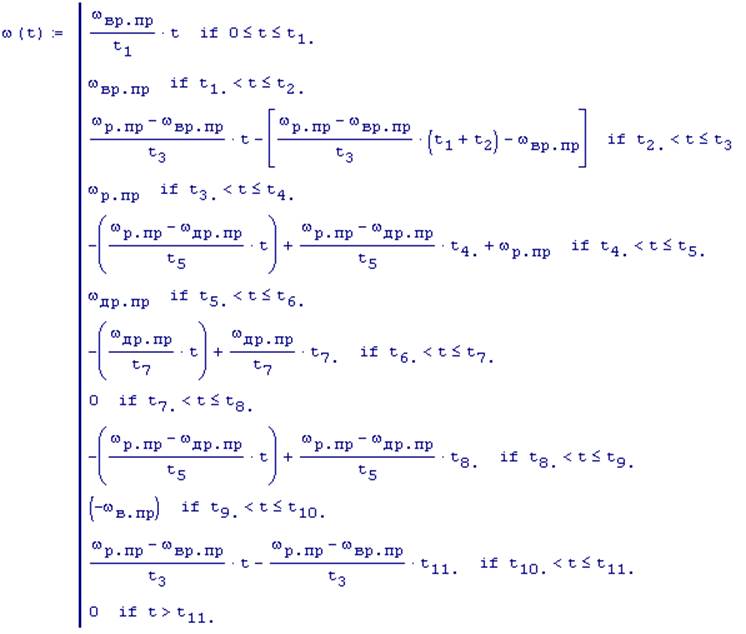
Построение тахограммы и нагрузочной диаграммы
Величину ускорения при разгоне, торможении и реверсе принимаем одинаковой.
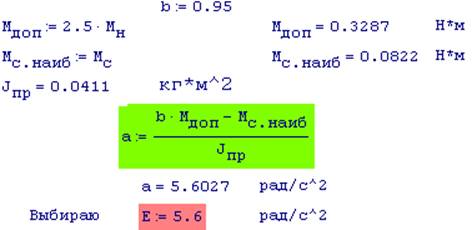
Допустимое значение ускорения, равное а, определяю из выражения
![]() - допустимое значение
электромагнитного момента двигателя;
- допустимое значение
электромагнитного момента двигателя;
![]() - наибольшее значение момента
сопротивления;
- наибольшее значение момента
сопротивления;
b – коэффициент запаса, учитывающий перерегулирование момента в переходных режимах. В большинстве случаев можно принять b=0,9-0,95.
Фактическое значение ускорения E выбираю исходя из условия
![]() .
.
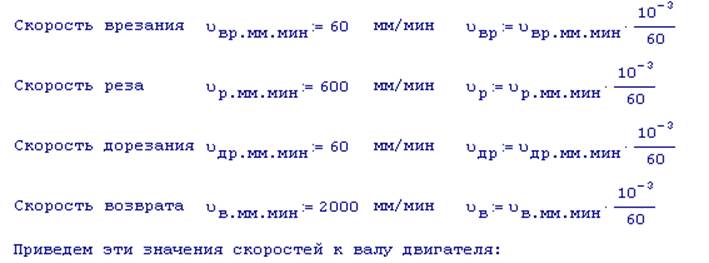
При построении упрощенных тахограмм предполагается, что на каждом этапе переходного процесса ускорение электропривода остается неизменным. Исходя из этого определим длительность каждого этапа переходного процесса, после чего построим тахограмму.


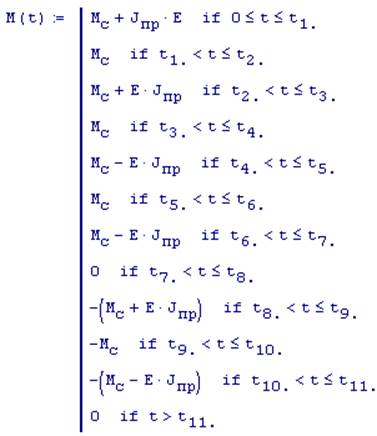
Нагрузочная диаграмма электропривода, характеризующая изменение момента электродвигателя за один цикл строится на основе выражения
![]() .
.
Значение момента сопротивления рассчитано ранее. Динамическая составляющая момента двигателя определяется величиной и знаком ускорения Е и величиной момента инерции J в соответствии с выражением
![]() .
.
Тахограмма и нагрузочная диаграмма изображены на рис. 5.
Предварительная (упрощенная) проверка работоспособности электропривода по условиям перегрузки и нагревания двигателя
Предварительную проверку работоспособности электропривода будем производить на основе нагрузочной диаграммы.
Для проверки работоспособности по условиям перегрузки по нагрузочной
диаграмме определим наибольшее по величине значение момента электродвигателя ![]() и сопоставим его с номинальным
значением момента
и сопоставим его с номинальным
значением момента ![]() . Электродвигатель
работоспособен по условиям перегрузки, если отношение
. Электродвигатель
работоспособен по условиям перегрузки, если отношение ![]() не превышает его перегрузочную
способность.
не превышает его перегрузочную
способность.
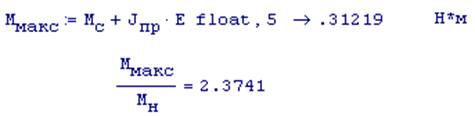
2.3741<2.5 электродвигатель работоспособен по условиям перегрузки.
Для проверки работоспособности электропривода по условиям нагревания двигателя будем использовать метод эквивалентного момента.
Общее время одного цикла работы суппорта
![]()
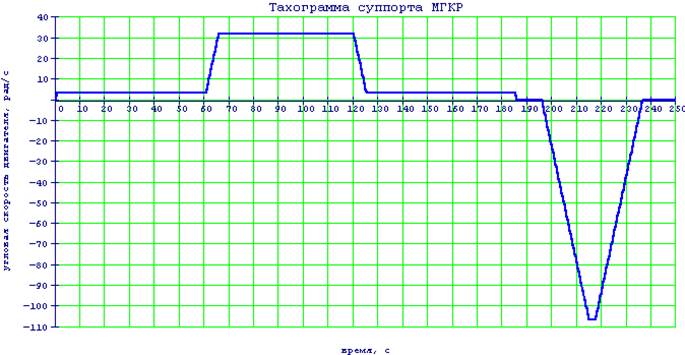
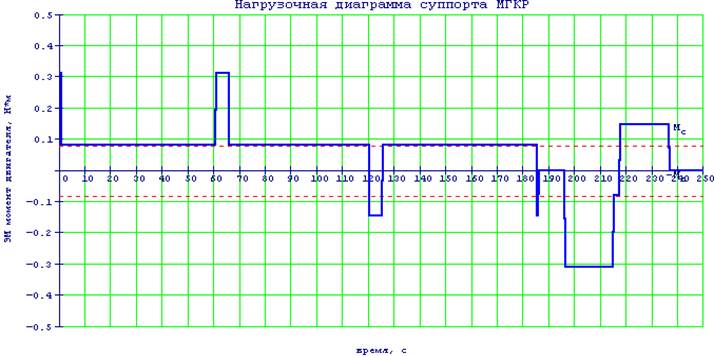
Рис. 5

5.Разработка функциональной схемы
Исходя из требований к электроприводу, сформулированных в разделе «Требования к системе управления электроприводом», выберем принцип управления электроприводом, определим количество и характер обратных связей, типы регуляторов и других управляющих элементов. Функциональная схема должна содержать все основные элементы системы управления, обеспечивающие работу электропривода в нормальном режиме.
Выбор принципа регулирования во многом зависит от назначения системы регулирования. Рассматривая технологический процесс и требования к электроприводу, необходимо установить принадлежность проектируемой системы регулирования к определённому классу. Автоматические системы управления электроприводами могут иметь в своей основе различные принципы регулирования:
- стабилизирующее регулирование, которое направлено на поддержание постоянства регулируемой координаты;
- программное регулирование, то есть управление с целью изменения регулируемой координаты по закону, определяемому заранее и заданному программой;
- следящее регулирование, то есть управление с целью изменения регулируемой координаты по заранее неизвестному закону.
Система управления ЭП передвижения суппорта МГКР организована по принципу стабилизирующего регулирования. Подобные стабилизирующие системы являются чаще всего системами стабилизации скорости.
С учётом довольно жёстких требований к качеству регулирования, систему управления принимаем замкнутой по скорости.
На практике используются три основных принципа организации взаимодействия подсистем регулирования координат электропривода:
- подчинённое регулирование;
- параллельное регулирование;
- регулирование с отсечками.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.