Система защиты в КТЭ обеспечивает нулевую, максимально-токовую (см. рис. 6, 8), минимально-токовую защиту в обмотках возбуждения двигателя и тахогенератора, защиту от превышения токов якоря и возбуждения, напряжения на якоре и скорости их допустимых значений, от перегрева подшипников и неисправности маслосмазки двигателя (для ЭП при токах выше 200 А) и др. При аварийных режимах защита отключает ЭП от питающей сети.
При срабатывании защиты во всех случаях выдается дифференцированный световой сигнал сигнализации первой неисправности с запоминанием каждого сигнала.
6.Разработка структурной схемы
Исходные данные
Линеаризация нелинейностей
В заданной части нелинейную характеристику имеет тиристорный преобразователь. Линеаризация тиристорного преобразователя заключается в выборе постоянного значения коэффициента передачи преобразователя согласно выражению
где Uн - номинальное напряжение преобразователя; Uymax - максимальное напряжение управления на входе преобразователя.
В качестве модели тиристорного преобразователя будем рассматривать апериодическое звено, постоянную времени которого выберем исходя из условия Tm>=0.002 c.

Структурная схема заданной части САУ
Разработаем структурную схему заданной части САУ на основании функциональной схемы. При этом, как было указано выше, в качестве модели тиристорного преобразователя будем рассматривать апериодическое звено.
Датчик тока ДТ-3АИ (типовой элемент унифицированной блочной системы регуляторов УБСР-АИ аналогового действия) является безъинерционным звеном с коэффициентом передачи Kт.
Датчик скорости снабжен фильтром, обеспечивающим снижение уровня высокочастотных помех на выходе датчика.
Постоянная времени фильтра равна Tф=RфC.В нашем случае можно принять Rф равным активному сопротивлению обмотки якоря тахогенератора, то есть примерно 5 Ом.
![]()
Постоянной времени фильтра можно пренебречь, поэтому датчик скорости будем считать безынерционным звеном с коэффициентом передачи Кс.
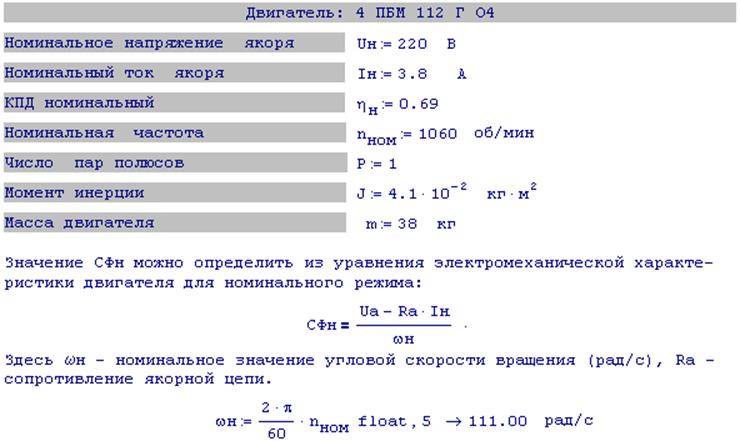
Параметры датчиков и полупроводникового управляемого выпрямителя определены выше. Для двигателя постоянного тока с независимым возбуждением подлежат определению значения СФн, Lа, Tа, где С - конструктивный коэффициент, Фн - номинальный поток возбуждения, Lа - индуктивность якорной цепи, Та - электромагнитная постоянная времени.
Из справочника выписываем данные двигателя, выбранного ранее:
При отсутствии сведений о величине индуктивности якорной цепи указанную величину определяем по приближенному выражению
![]()
В данном двигателе имеется компенсационная обмотка Þ принимаю b=0.25.
Электромагнитная постоянная времени Tа есть отношение индуктивности якорной цепи к ее сопротивлению
![]()
Значение Rа в паспортных данных двигателя отсутствует, поэтому используем приближенную формулу
![]()
Подставляя числовые значения в полученные выражения для искомых величин, получаем:
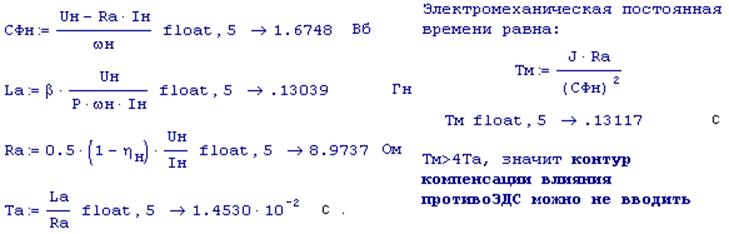
При синтезе САУ будем использовать общепринятое упрощение, заключающееся в пренебрежении влиянием внутренней обратной связи по противоЭДС двигателя.
В этом случае структурная схема заданной части будет представлять собой последовательное соединение типовых звеньев и датчики обратных связей. Количество контуров регулирования выбираем равным количеству обратных связей, то есть трем.
При синтезе регуляторов соответствующих координат электропривода (тока якоря; угловой скорости вращения) будем использовать стандартную процедуру синтеза регуляторов системы подчиненного регулирования.
Структурная схема контура тока якоря имеет вид:
![]()
Рис. 10
Контур тока якоря будем настраивать на технический (модульный) оптимум, так как нам необходимо высокое быстродействие и малое перерегулирование (время регулирования 4,7Тm, перерегулирование 4,3%).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.