Так как выбор двигателя и редуктора будет производиться позднее, а масса двигателя и масса редуктора необходимы для расчета уже в данный момент, принимаю двигатель марки 4 ПБМ 112 ГО 4, масса которого mдвиг=38кг, а также редуктор с передаточным числом i=96, КПД 0,9 и массой mред=30кг (принятые двигатель и редуктор установлены на работающей МГКР).
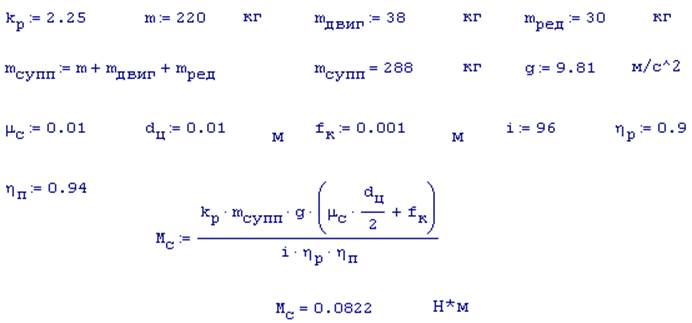
g – ускорение свободного падения;
mc – коэфф. трения скольжения в подшипниках ходовых колес; для шариковых и роликовых подшипников он равен 0,01;
dц – диаметр цапф (подшипников) колес;
fк – коэффициент трения качения ходовых колес по рельсам, он равен 0,001м;
hп – КПД передачи ведущая шестерня – зубчатая рейка, равен 0,94.
Момент, обусловленный силами трения скольжения в подшипниках ходовых колес, ввиду примерного равенства диаметров ходового колеса и ведущей шестерни, а также малости указанного момента по сравнению с моментом трения качения ходовых колес о рельсы, считаю приложенным к валу ведущей шестерни. Поэтому вышеприведенную формулу для расчета момента сопротивления можно считать достаточно точной.
Итак:
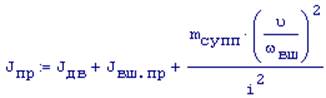
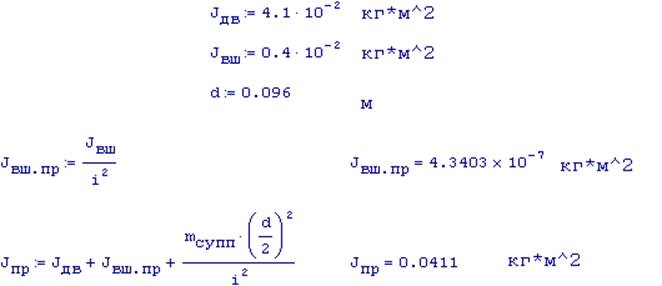
Для того чтобы получить приведенный к валу двигателя момент инерции всего механизма, необходимо привести момент инерции на валу ведущей шестерни, к валу двигателя и сложить его с моментом инерции на валу двигателя, а также учесть момент инерции, обусловленный инерционными массами механизма:
Итак, проведя вышеизложенные вычисления, мы получили мех-кую схему, в которой:
1. отсутствуют кинематические передачи;
2. существует один вид движения (вращательный);
3. действующие во всех элементах моменты и усилия приведены к двигателю;
4. все моменты инерции и инерционные массы приведены также к двигателю.
То есть мы получили расчетную механическую схему (рис. 4).
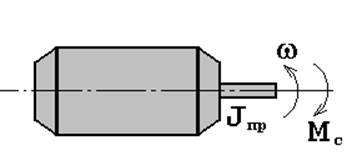
Рис. 4
Требования к системе управления электроприводом
Высокая надёжность работы электрооборудования МНЛЗ исключительно важна, поэтому требования к нему предъявляются более жёсткие, чем к электрооборудованию прокатных станов. Небольшая неисправность, которая вызовет кратковременную задержку работы прокатного стана, на МНЛЗ может привести к потере всей плавки.
К основным требованиям, предъявляемым к электроприводу передвижения суппорта машины газокислородной резки можно отнести:
- высокая надёжность и безотказность работы электропривода;
- широкий диапазон регулирования скорости;
- высокое быстродействие, то есть минимальное время протекания переходных процессов;
- точная отработка заданных перемещений;
- работа в строго определённом цикле;
- рекуперация энергии в сеть при режимах торможения;
- аварийное торможение.
4.Выбор рода тока, типа электродвигателя и типа электропривода
В последние годы всё шире используются комплектные тиристорные электроприводы, обеспечивающие регулирование параметров в широком диапазоне.
Комплектные тиристорные электроприводы позволяют снизить трудоёмкость разработок и изготовления электроприводов, повысить их заводскую готовность, снизить затраты на электромонтажные работы, сократить время на наладку приборов.
В электроприводе суппорта машины газовой резки диапазон регулирования скорости довольно широкий. В электроприводах переменного тока такой диапазон получить сложно. Данный электропривод работает в повторно - кратковременном режиме с большим числом включений, поэтому в данном случае целесообразнее использовать электропривод постоянного тока, который в режиме пусков и торможений имеет ряд преимуществ перед электроприводом переменного тока:
- двигатель постоянного тока легче переносит перепады нагрузки;
- двигатели постоянного тока имеют более высокую перегрузочную способность, достигающую трёх-, четырёхкратной величины номинального момента, а у двигателей переменного тока она не превышает 2,5 кратной величины номинального момента.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.