Питание обмотки возбуждения двигателей (рис. 8) осуществляется от трехфазных мостовых нереверсивных и реверсивных ТП (тиристоры VS1— VS6) с такими же СИФУ, как в ТПЯ. Питание ТП осуществляется от сети низкого напряжения через согласующие питающие трансформаторы T (возможны варианты непосредственного питания от сети через токоограничивающие реакторы). Подключение к сети осуществляется автоматическим выключателем QF, осуществляющим максимально-токовую защиту. Тиристоры защищены цепочками RС. Обмотка возбуждения от перенапряжений защищена резисторами R, включенными последовательно-параллельно при больших мощностях двигателей. Реле KV используется для нулевой защиты.
Автоматическая система регулирования (АСР) в ЭКТ выпускается 24 видов в зависимости от необходимости ее использования. Разработаны АСР: скорости, ЭДС, положения, мощности, напряжения и др. с управлением одно-, двух- и многодвигательными (до 10 и 20 двигателей) ЭП с однозонным и двухзонным регулированием скорости, с реверсом в цепях якоря и возбуждения двигателя, для системы Г – Д, аналоговые и цифровые.
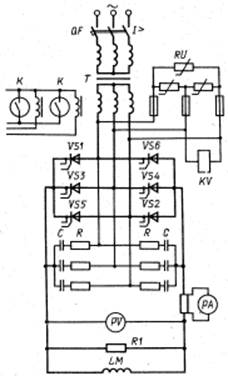
Рис. 8. Схема питания обмотки возбуждения двигателей ЭП серии КТЭ
АСР построены по принципу подчиненного регулирования. На рис. 9 приведена функциональная схема однозонного реверсивного ЭП с АСР скорости. На схеме обозначено: M, LM – ДПТ независимого возбуждения; ТПЯ(UM), ТПВ(UL) – ТП цепей якоря и возбуждения двигателя с СИФУЯ (AUM) и СИФУВ(AUL); L1–L6 – токоограничивающие реакторы (возможно использование силовых трансформаторов); ЗС(SR) – задатчик скорости, включающий в себя СКА – сельсинный командоаппарат и ФЧВ – фазочувствительный выпрямитель (имеются АСР со ступенчатым задатчиком скорости); ЗИС(SJR), ЗИТ(SJA) – задатчики интенсивности скорости и тока; РС(AR), РТЯ(AA1), РТВ(AA2) – регуляторы скорости, тока якоря (адаптивный), тока возбуждения; BR – тахогенератор; ДС(UV), ДТЯ(UA1), ДТВ(UA2) – датчики скорости, токов якоря и возбуждения; УШ, УТЛ – устройства шунтирования регуляторов и технологической логики; У1(А1), У2(А2) – дополнительные суммирующие усилители.
При применении в качестве ЗС СКА в схеме используется ФЧВ, пребразующий сигнал переменного тока сельсина в сигнал задания скорости Uз,с постоянного тока, РС выполняется при необходимости пропорциональным или пропорционально-интегральным с ограничением сигнала задания тока uз,т, обеспечиваемым схемой с двумя нуль-органами, выполненными на операционных усилителях, и опорными напряжениями. РТЯ – пропорционально-интегральный, адаптивный регулятор, осуществляющий регулируемое повышение коэффициента усиления при работе двигателя в режиме прерывистого тока. ЗИС и ЗИТ обеспечивают заданные темпы нарастания скорости и тока, обеспечивая соответственно их производные dw/dt и di/dt. На У1 иУ2 могут суммироваться различные технологические сигналы, например на У1 с УТЛ подаются технологические команды – движение вперед, назад, толчок вперед, назад, ограничение движения механизма и т. д. Эти усилители ограничивают максимальные значения скорости wmax и тока imax.
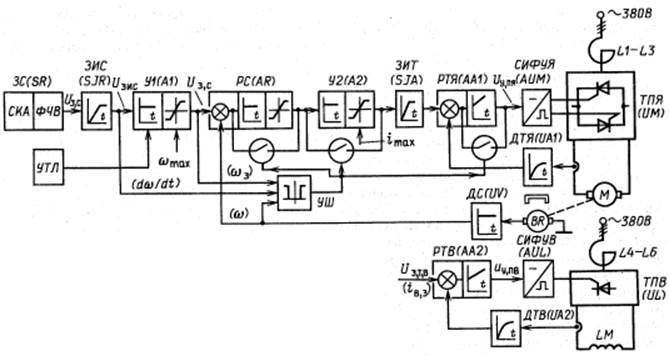
Рис. 9. Функциональная схема однозонного ЭП серии КТЭ
ПИ РС и РТЯ не позволяют двигателю остановиться (неподвижно) из-за самохода, возникающего при интегрировании регуляторами сигналов дрейфов элементов схемы. Для остановки двигателя в схеме применено УШ, обеспечивающее шунтирование регуляторов при снятых заданиях на скорость uз,с и ускорение uз,с(t) и отсутствие скорости w и переводящее в П – режим РТЯ.
Обмотка возбуждения двигателя питается от управляемого ТПВ с одноконтурной схемой управления с РТВ, осуществляющим стабилизацию заданного напряжением Uз,т,в значения тока возбуждения двигателя.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.