










2.КИНЕМАТИЧЕСКИЙ АНАЛИЗ МЕХАНИЗМОВ
2.1. Определение крайних (мертвых) положений механизмов.
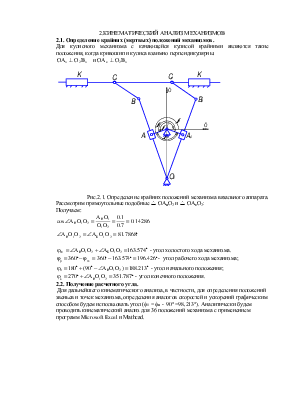
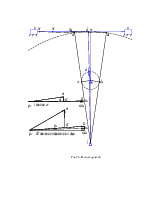
Для кулисного механизма с качающейся кулисой крайними являются такие положения, когда кривошип и кулиса взаимно перпендикулярны.
![]()
Рис.2.1. Определение крайних положений механизма вязального аппарата.
Рассмотрим прямоугольные подобные r ОАнО2 и r ОАкО2:
Получаем:
![]()
![]() - угол холостого хода механизма.
- угол холостого хода механизма.
![]() - угол рабочего хода механизма;
- угол рабочего хода механизма; ![]() - угол начального положения;
- угол начального положения;
![]() - угол конечного положения.
- угол конечного положения.
2.2. Получение расчетного угла.
Для дальнейшего кинематического анализа, в частности, для определения положений звеньев и точек механизма, определения аналогов скоростей и ускорений графическим способом будем использовать угол (f1 = fн - 90° =98,213°). Аналитически будем проводить кинематический анализ для 36 положений механизма с применением программ Microsoft Excel и Mathcad.
2.3. Кинематическое исследование механизма аналитическим методом.
2.3.1. Построение замкнутых контуров методом Зиновьева. Определение положений звеньев механизма аналитическим методом.
Для определения линейных и угловых координат, скоростей и ускорений точек звеньев применим метод замкнутых векторных контуров.
1. Рисуем в любом промежуточном положении структурную схему исследуемого механизма.
2. Выбираем координатную систему. Начало координат помещаем в точку А – стойку начального звена.
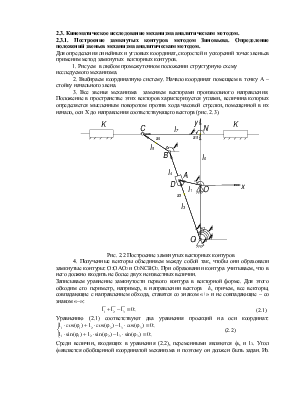
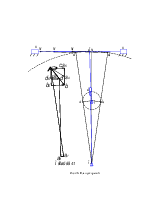
3. Все звенья механизма заменяем векторами произвольного направления. Положение в пространстве этих векторов характеризуется углами, величина которых определяется мысленным поворотом против хода часовой стрелки, помещенной в их начало, оси Х до направления соответствующего вектора (рис. 2.3).
Рис. 2.2 Построение замкнутых векторных контуров
4. Полученные векторы объединяем между собой так, чтобы они образовали замкнутые контуры: О2ОАО2 и О2NCBО2. При образовании контура учитываем, что в него должно входить не более двух неизвестных величин.
Записываем уравнение замкнутости первого контура в векторной форме. Для этого обходим его периметр, например, в направлении вектора `l1, причем, все векторы, совпадающие с направлением обхода, ставятся со знаком «+» и не совпадающие – со знаком «-»:
![]() (2.1)
(2.1)
Уравнению (2.1) соответствуют два уравнения проекций на
оси
координат:
 (2.2)
(2.2)
Среди величин, входящих в уравнения (2.2), переменными являются f3, и l3. Угол f1является обобщенной координатой механизма и поэтому он должен быть задан. Из уравнений (2.2) подлежат определению l3, f3. Находим модуль вектора l3 и угол наклона f3:
 (2.3)
(2.3)
Уравнение замкнутости контура О2NCBО2 имеет вид:
![]() (2.4)
(2.4)
Уравнению (2.4) соответствуют два уравнения проекций на оси координат:
 (2.5)
(2.5)
Так как f6=90°, f7=180° то система уравнений (2.5) примет вид:
 (2.6)
(2.6)
Переменными являются в уравнения (2.6) f5 и l7. При этом f3 = f4.
Из (2.6) находим модуль вектора l7 и угол наклона f5:
 (2.7)
(2.7)
Для определения положений центров масс звеньев 3 и 4 S3, S4 записываем уравнения замкнутости контуров О2ОS3О2 и О2ВS4О2 (рис. 2.3).
Рис.2.3. Построение замкнутых векторных контуров для S3, S4.
 (2.8)
(2.8)
Из уравнений (2.12) находим координаты центров масс звеньев 3 и 4:
 (2.9)
(2.9)
 (2.10)
(2.10)
Положение центра масс 5 звена S5 :
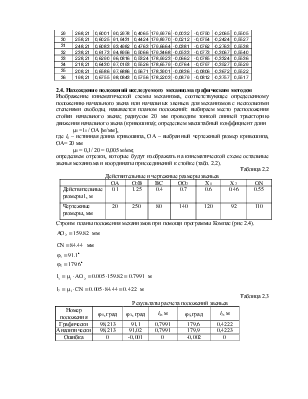
Все вычисленные по формулам величины сравниваем с соответствующими величинами, найденными из плана механизма. Результаты сравнения приведены в (таб. 2.3.)
Расчет положений для тридцати шести значений представлен в (таб. 2.1.)
Расчет положений для тридцати шести положений звеньев механизма
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.