При наличии комплексно-сопряжённых собственных значений матрицы А, число переключений в системе м б произвольным. В асимптотике оно стремится к ∞, в реальных системах с учётом реализации релейного элемента, как правило, 10-15.
Применяется для формирования опт. управления в виде обратной связи, в случае когда управление разрывно (релейный характер).
![]() . Переход из начальных состояний
. Переход из начальных состояний ![]() в заданные конечные
в заданные конечные ![]() в
соответствии с критерием оптимальности: J =
в
соответствии с критерием оптимальности: J =  .
.
Оптимальный
з-н управления в этом случае имеет вид: ![]()
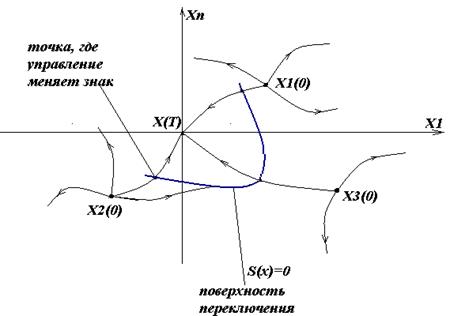
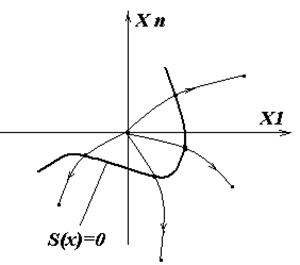
S(x) – вектор функций,
определяющих в пространстве состояний некоторую поверхность, которая наз-ся
поверхностью переключения. ![]() .
.
Для определения этой поверхности конечная
точка ![]() «приводится» к началу координат. Затем в
пространстве состояний исследуются траектории перехода из произвольных
начальных состояний x
(0) в конечную точку x(T) = 0. На траекториях перехода выделяются
точки, где происходит смена знака управления, которые объединяются в
поверхность переключения S(x)=0.
«приводится» к началу координат. Затем в
пространстве состояний исследуются траектории перехода из произвольных
начальных состояний x
(0) в конечную точку x(T) = 0. На траекториях перехода выделяются
точки, где происходит смена знака управления, которые объединяются в
поверхность переключения S(x)=0.
Чтобы получить траекторию перехода из нач точки x1 (0) в начало координат, нужно задавать нач условия для сопряжённых координат Ψ(0). Если эти нач условия выбраны неудачно, то получим траекторию перехода не в x(T) = 0, а в произвольную точку пространства состояний. В этом случае надо снова задать новые н.у. для Ψ(0). Объединяя точки переключения управления на всех траекториях перехода из произвольных состояний в начало координат, м получить поверхность переключения.
Т.о., метод поверхности переключения
позволяет получить оптимальный з-н управления в виде обратной связи. ![]() .
.
Но при этом приходится рассматривать две совокупности нач-х условий: для переменных состояния X(0) и сопряжённых координат Ψ(0), что существенно затрудняет определение управления. Можно применять для объектов с аддитивным управлением.
Этот способ позволяет в рамках метода поверхности переключения упростить поиск необходимой поверхности. Суть метода заключается в том, что начальная и конечная точки «меняются местами», что в пространстве состояний соответствует движению в обратную сторону.
+ t – обычное время : X(0) → X(T) = 0 и две совокупности нач условий: { X(0), Ψ(0)}.
- t – обратное время: X(-T) = 0 → X(0) и {Ψ(0)}.
Постановка задачи синтеза оптимальной системы
в обратном времени формулируется следующим образом. Для объекта ![]() с ограниченным ресурсом управления
необходимо определить оптимальное управление в виде обратной связи, которое
обеспечивает переход из начальной точки X(0)=0 в конечную X(T) в соответствии с
критерием оптимальности J =
с ограниченным ресурсом управления
необходимо определить оптимальное управление в виде обратной связи, которое
обеспечивает переход из начальной точки X(0)=0 в конечную X(T) в соответствии с
критерием оптимальности J =  . При этом заранее
известно, что оптимальное управление имеет релейный характер. В этом случае
нужно перебирать только одну совокупность начальных условий.
. При этом заранее
известно, что оптимальное управление имеет релейный характер. В этом случае
нужно перебирать только одну совокупность начальных условий.
|
|
В соответствии с методом поверхности переключений в пространстве состояний на траекториях перехода выделяются точки, где происходит смена знака управления и объединяются в поверхность S(x).
Субоптимальными наз-ся системы, которые близки по свойствам к оптимальным с заданной точностью. Точность приближения к оптимальной системе опред-ся соотношением
|
|
|
В общем случае субоптимальные системы м.б. получены в резульиате:
1) аппроксимации поверхности переключений, а следовательно использование приближённого з-на управления;
2) ограничения рабочей области в пространстве состояний.
Свойства субоптимальной системы. Процессы в субоптимальной системе будут существенно зависеть от начальных условий.
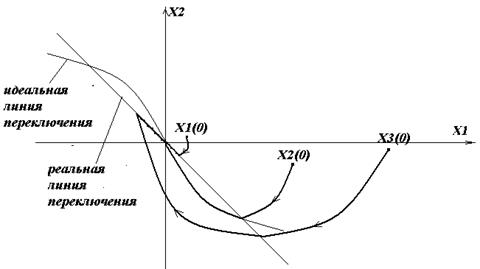
При движении из X1 (0) изображающая точка системы попадает на реальную линию переключений SР (x), а затем движется вдоль неё в скользящем режиме.
Из нач условий X2 (0) – строгооптимальный процесс. Изображающая точка системы попадает в точку пересечения идеальной и реальной линий переключения и к началу координат движется по соответствующему участку идеальной линии переключений, т е по оптимальной траектории.
При движении из X3 (0) – изображающая точка б доходить до SР (x), переключать на траекторию, соответ-щую другому знаку управления, вновь попадать на реальную линию переключения и двиг-ся вдоль неё в скользящем режиме. Чем больше точек пересечения реал и идеал линий переключения, тем чаще в системе б возникать оптимальный процесс.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.
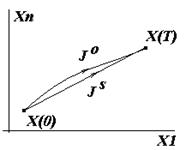
 , JS– критерий,
соответствующий субоптимальной системе.
, JS– критерий,
соответствующий субоптимальной системе.