![]() , которое представляет
собой нелинейное дифференциальное уравнение относ. переменной y. Полагая
, которое представляет
собой нелинейное дифференциальное уравнение относ. переменной y. Полагая ![]() , запишем для него Ур-е статики kG(y,t) = 0, (***), где завис-ть
G от t параметрич-я.Поскольку
k≠0,из выраж-я
(***) следует G(y,t)=0(****)
, запишем для него Ур-е статики kG(y,t) = 0, (***), где завис-ть
G от t параметрич-я.Поскольку
k≠0,из выраж-я
(***) следует G(y,t)=0(****)
Таким образом, в случае устойчивости замкнутой системы процессы в ней будут сходиться к точке равновесия, которая является точкой экстремума. Устойчивость движения в замкнутой системе можно обеспечить соответствующим выбором коэффициента усиления k, при этом выход на экстремум происходит автоматически.
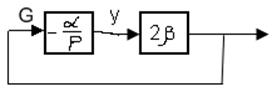
Данный метод позволяет организовать движение к глобальному экстремуму в случае, когда ЭХ имеет локальные экстремумы. СУ проскакивает локальные экстремумы, благодаря введению доп. инерционности для придания процессам колебательного характера. При этом для объекта 1-го порядка, замкнутая система имеет вид:
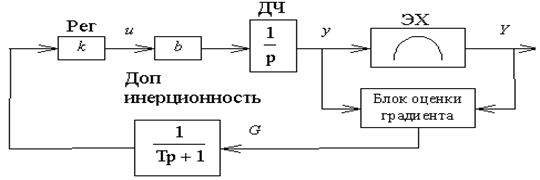 Операторное
уравнение замкнутой системы:
Операторное
уравнение замкнутой системы:
y = b*k *G/ [p(Tp+1)] (*)
где
 , так как экстремальная характеристика
описывается уравнением Y=y2.
, так как экстремальная характеристика
описывается уравнением Y=y2.
Преобразуем уравнение (*) к виду: p(Tp+1)y=2bky, которое представим в стандартной форме: (Tp2 +p-2bk)y=0. Таким образом, точка равновесия y0 =0 эквивалентна точке экстремума, G=0. Характер движения системы к точке экстремума определяется характеристическим уравнением Tp2 +p-2bk = 0.
Выбирая распределение корней из условия обеспечения требуемых показателей качества процесса выхода на экстремум (t0* и σ * % ≠ 0), сформируем желаемое характеристическое уравнение второго порядка. Приравнивая коэффициенты при соответствующих степенях оператора pэтих двух уравнений(согласно методике модального метода синтеза), определим численные значения kи T ( таким образом, чтобы процесс в системе был колебательным и обладал заданной длительностью и s.
На ряду с условием статики lim y(t)=y0
при t->∞ ,
предъявляются условия к динамике (tп*,σ*,Δ*)
,
предъявляются условия к динамике (tп*,σ*,Δ*)
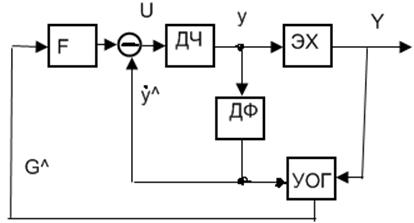 В случае идеального
дифференцирования поведение замкнутой системы описывается уравнением:
В случае идеального
дифференцирования поведение замкнутой системы описывается уравнением: ![]() , в статике имеем y=y0(G=0). Движение в этом
случае обладает особенностями: процесс монотонный, соотв. требования по быстр,
не имеет колебаний вокруг экстр. При реализации зу U=k[F(.)-y(.)] необходимо
предусмотреть возможность измерения y(.)(t) и G. Для оценки
производной можно использовать ДФ, а для градиента спец фильтр, поскольку уже
оценивается y(.)(t) .
, в статике имеем y=y0(G=0). Движение в этом
случае обладает особенностями: процесс монотонный, соотв. требования по быстр,
не имеет колебаний вокруг экстр. При реализации зу U=k[F(.)-y(.)] необходимо
предусмотреть возможность измерения y(.)(t) и G. Для оценки
производной можно использовать ДФ, а для градиента спец фильтр, поскольку уже
оценивается y(.)(t) .
Для получения адекватных оценок
производных, ДФ и УОГ должны обладать малыми инерционностями. Поскольку для
оценки G испол оценка y(.)(t) , то ![]() .
.
Вследствие этого в системе возникают
разнотемповые движения: 1. ![]() -сверхбыстрые, 2.
-сверхбыстрые, 2. ![]() -быстрые, 3. медленные – основные, соотв
процессу движения к экстремуму.
-быстрые, 3. медленные – основные, соотв
процессу движения к экстремуму.
Поиск экстр осущ к не нулевому нач сост y(0)/=0. Для того, чтобы процесс поиска соотв предъявл к нему требованиям должны быть согл:
![]()
11. Двухконтурные системы со старшей производной в управлении

![]()
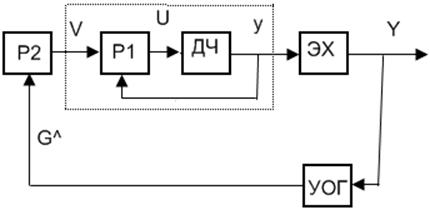 Используется
метод старшей производной с учетом особенностей ЭО. Учтем особенности объекта,
предварительно стабилизировав динамическую часть, а затем организуем движение к
этому режиму. Синтезируем двухконтурную систему
Используется
метод старшей производной с учетом особенностей ЭО. Учтем особенности объекта,
предварительно стабилизировав динамическую часть, а затем организуем движение к
этому режиму. Синтезируем двухконтурную систему
Необходимо разнести процессы стабилизации и поиска экстремума, при расчете регуляторов будем ориентирована на требование tп1<<tп2.
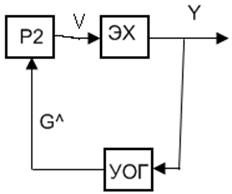 Получаем
2 этапа: 1. Стабилизация ДЧ(по окончанию переходного процесса этот контур
вырождается в единый контур усиления) ; 2. В качестве Р2 выбирается интегратор
Получаем
2 этапа: 1. Стабилизация ДЧ(по окончанию переходного процесса этот контур
вырождается в единый контур усиления) ; 2. В качестве Р2 выбирается интегратор  и
и ![]() ->
->![]() , получаем эквивалентную струк схему:
, получаем эквивалентную струк схему:
Коэф.
![]() находится модальным методом на основе
требований к быстродействию tп1. Подход действует для медленных процессов.
находится модальным методом на основе
требований к быстродействию tп1. Подход действует для медленных процессов.
Оптимальными СУ называютт системы, в кот-х максимально использованы возможности объекта при совершении переходных процессов в рамках существующих ограничений.
1) Описание объекта. Описание представлено в переменных сост.:
![]() ; О. д.б. стационарным f(x,u) – вектор нелин-х
фунций, удовлет-щих условию существования и единственности реш-я диф уравнения.
В частном случае объект м б описан нелинейным стационарным уравнением:
; О. д.б. стационарным f(x,u) – вектор нелин-х
фунций, удовлет-щих условию существования и единственности реш-я диф уравнения.
В частном случае объект м б описан нелинейным стационарным уравнением:
![]() ,где В – матрица нелинейных функций.
,где В – матрица нелинейных функций.
![]() - линейный стационарный объект.
- линейный стационарный объект.
1) Ограничения на объект.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.