Преобразуем (**), введя ряд обозначений:
|
Z = |
1) введём вектор сопряжённых координат Z – представляет собой вектор состояния объекта, дополненный нулевой координатой. Z € R n+1 |
|
|
1) введём расширенный вектор правых частей φ € R n+1 2) вектор сопряж-х корд-т (специфический) Ψ € R n+1 Ψ = [ -1 -∂V/∂x1 …. -∂V / ∂xn] |
Определим скалярное произведение H = Ψ (z) φ (z,u), кот-й наз-ся гамильтонианом.
H = - f0 (x,u) - ∂V/∂x T * f (x,u).
Основное
соотношение метода: ![]() H( z,u ) = 0. Управление из
области допустимых значений, кот-е обеспечивает максимум гамильтониана яв-ся
оптимальным. По сути переходим к задаче поиска экстремума. Необходимое
условие экстремума: ∂H/∂uT = 0. Найденное из этого
условия, управление может выходить за пределы допустимых значений (при
ограниченном ресурсе, например | u | ≤ Umax). Поэтому в качестве
оптимального управления берутся предельные значения управления, лежащие на
границе обл-ти допустимых значений ( Umax).
H( z,u ) = 0. Управление из
области допустимых значений, кот-е обеспечивает максимум гамильтониана яв-ся
оптимальным. По сути переходим к задаче поиска экстремума. Необходимое
условие экстремума: ∂H/∂uT = 0. Найденное из этого
условия, управление может выходить за пределы допустимых значений (при
ограниченном ресурсе, например | u | ≤ Umax). Поэтому в качестве
оптимального управления берутся предельные значения управления, лежащие на
границе обл-ти допустимых значений ( Umax).
Процедура синтеза регулятора
1)
описание объекта приводится к стандартному виду (в переменных состояния) ![]() =f(x,u) записывается критерий
оптимальности.
=f(x,u) записывается критерий
оптимальности.
2) Вводятся расширенный вектор состояния Z, вектор правых частей φ и сопряжённых координат Ψ.
3) Формируется гамильтониан в виде скалярного произ-я ф-ций: H = Ψ (z) φ (z,u)
4) Из условия максимума гамильтониана
опред-ся оптимальное управление как фун-я сопряж-х координат ![]() Н :
Н : ![]() u 0 = u0 (Ψ)
u 0 = u0 (Ψ)
5)
Формир-ся система диф уравнений для нахождения сопряжённых координат 
6) Вычисляется оптим-ное управление в виде ф-ции времени (программное управление) u0 = u0 (t)
7) Различными способами пытаются перейти от программного управ-я к управлению в виде обратной связи u0 = u0 (x)
16. Процедура синтеза оптимальных систем на основе принципа максимума Понтрягина
Процедура синтеза регулятора
1)
Ставится задача синтеза и описание объекта приводится к стандартному виду (в
переменных состояния) ![]() =f(x,u)
=f(x,u)
2) Вводятся расширенный вектор состояния Z, вектор правых частей φ и сопряжённых координат Ψ.
3) Определяется гамильтониан в виде скалярного произ-я ф-ций: H = Ψ (z) φ (z,u), при этом используется частная производная по U, либо подставляется максимальное значение.
4) Из условия максимума гамильтониана
опред-ся оптимальное управление как фун-я сопряж-х координат ![]() Н :
Н : ![]() u 0 = u0 (Ψ)
u 0 = u0 (Ψ)
5) Формир-ся система диф уравнений для нахождения сопряжённых координат
6) Вычисляется оптим-ное управление в виде ф-ции времени (программное управление) u0 = u0 (t)
7) Различными способами пытаются перейти от программного управ-я к управлению в виде обратной связи u0 = u0 (x)
а) Рассмотрим общий класс объектов управления (Гамильтониан быстродействия)
![]() с ограниченным
управлением u € ΩU(чаще всего ui≤|uim|) и критерием
оптимальности J =
с ограниченным
управлением u € ΩU(чаще всего ui≤|uim|) и критерием
оптимальности J =  . Сформируем гамильтониан согласно
процедуре синтеза на основе принципа максимума
. Сформируем гамильтониан согласно
процедуре синтеза на основе принципа максимума
H = -1 + Ψ1 *f1 (.)+ … + Ψn * fn (.). его макс. =0.
В задаче оптимального быстродействия 1-ое
слагаемое гамильтониана константа, не зависит от управляющего воздействия, а
следовательно, не влияет на максимум гамильтониана по U. Поэтому, с целью
упрощения в задаче оптимального быстродействия нет необходимости расширять вектор
состояния объекта. Для неё формируется, так называемый, гамильтониан быстродействия
Hб = ![]() (x) f (x,u). В этом случае
уравнение принципа максимума принимает вид
(x) f (x,u). В этом случае
уравнение принципа максимума принимает вид ![]() Hб = 1
Hб = 1 ![]() u 0 = u0 (t)
u 0 = u0 (t)
б) Для объектов с аддитивным управлением (разрывное управление)
![]()
формируем гамильтониан быстродействия
Hб = ( Ψ1 *f1 (.)+ … + Ψn * fn (.)) + (Ψ1 *B1 (.)u+ … + Ψn *Bn(.)u).
Управление всегда носит релейный характер:
U0 = Um*sign (ΨB)
в) для класса линейных объектов (теорема о числе переключений)
![]()
Т.к. управление входит аддитивно, то оптим-ное управление носит релейный характер.
Теорема о числе переключений. Если корни характеристического уравнения вещественные, то число переключений управляющего воздействия не превышает (n-1), где n – порядок объекта. Эта теорема справедлива как для устойчивых, так и для неустойчивых объектов.
Пример: n = 3
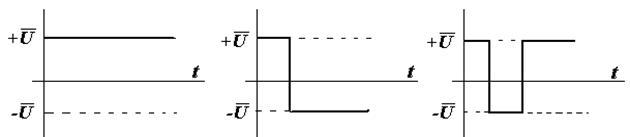
1- нет переключений, 2 – одно перекл., 3 – 2 переключ.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.