Наличие колебаний на входе приводит к
появлению колебаний такой же частоты на выходе, причем при прохождении
экстремума колебания на выходе изменяют фазу на 1800. если ![]() - не достигли экстремума.
- не достигли экстремума.
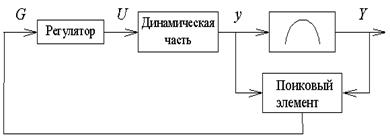
Для сравнения сигналов с входа и выхода
экстремального объекта используется специальное фазочувствительное устройство.
Если ![]() -разность фаз, то на выходе
фазочувствительного устройства -положительный сигнал, в противном случае –
отрицательный. Этот сигнал, пройдя через специальный фильтр, будет
пропорционален частной производной
-разность фаз, то на выходе
фазочувствительного устройства -положительный сигнал, в противном случае –
отрицательный. Этот сигнал, пройдя через специальный фильтр, будет
пропорционален частной производной
В качестве фазочувствительного элемента можно использовать блок умножения.
При малой амплитуде поискового сигнала можно считать, что статическая экстремальная характеристика линейна. На выходе фильтра получим сигнал, пропорциональный градиенту z=π A2 G.
Метод синхронного детектирования позволяет получить оценку G, пригодную для формирования движения к экстремуму, хорошо защищен от помех и часто применяется. Может применяться для многоканального варианта ДЧ. В этом случае используются несколько ГСК различных по w по 1 на каждый канал, полосовые фильтры на выходе.
Недостаток: наличие колебаний на выходе. В точке экстремума возникают автоколебания. Их w зависит от w поисковых колебаний.
Данная схема – неявная реализация способа деления производных, где вместо операции деления - умножение.
Промежуточная переменная z определяется соотношением
![]() (*), где
(*), где ![]() - оценка
выходной переменной экстремального объекта; T - постоянная времени
устройства.
- оценка
выходной переменной экстремального объекта; T - постоянная времени
устройства.
Запишем
уравнение динамики фильтра оценки градиента относительно переменной z , для
чего продифференцируем по времени соотношение (*):![]() (**)
преобразуем
(**)
преобразуем  . Учитывая, что
. Учитывая, что ![]() , представим (**) в виде:
, представим (**) в виде: ![]() . При достаточно малом значении постоянной
времени (Т→0) уравнение вырождается в соотношение:
. При достаточно малом значении постоянной
времени (Т→0) уравнение вырождается в соотношение: ![]() ,или
,или 
На практике необходимую для оценки градиента
производную ![]() оценивают с помощью дифференцирующего
фильтра (показан пунктиром), имеющего малую постоянную времени. Точность метода
тем выше, чем Т меньше.
оценивают с помощью дифференцирующего
фильтра (показан пунктиром), имеющего малую постоянную времени. Точность метода
тем выше, чем Т меньше.
Постоянная времени ДФ д.б. меньше на порядок постоянной времени ФОЧП. В этом случае при реализации системы экстремального регулирования в ней будут возникать 3 вида разнотемповых процессов, что не удобно на практике. С целью упрощения реализации ДФ в ряде случаев постоянные времени м выбирать соизмеримыми (загрубляют G).
Основаны на пошаговом сравнении выхода экстремального объекта. Применяются для объекта с малоинерционной ДЧ. Дискретные САУ.
 Вид экстремума известен заранее (мин./макс.).
Вид экстремума известен заранее (мин./макс.).
В нач момент времени делается пробные шаги влево и вправо и определяется соответ-щее значение функции качества: y* ± Δy → Y(y* ± Δy) = Y1. И сравниваются между собой.
Если при поиске максимума значение больше первоначального значения, делается следующий шаг в том же направлении до тех пор, пока не проскочим т. экстремума, когда значение показателя качества может оказаться меньше предыдущего, при этом направление меняется. В результате вокруг точки экстремума возникают незатухающие колебания, их величина зависит от величины шагов.
Y(y0 + Δy) > Y0 , Y(y0 - Δy) > Y0 →Y0 – min
Y(y0 + Δy) < Y0 , Y(y0 - Δy) < Y0 →Y0 – max
Недостатки: 1) невозможно обеспечить заданное качество процесса движения к экстремуму. 2) наличие колебаний приводит к доп. затратам энергии. Иногда используют переменный шаг, который уменьшается по мере приближения к экстремуму, при этом время выхода на экстремум увеличивается.
8. Градиентные системы первого порядка
Градиентные системы 1-го порядка Рассмотрим организацию движ-я к экстремуму на примере простейшего объекта упр-я, кот-й описывается следующей сис-мой уравнений:
 (*)
(*)
Сформируем пропорциональный градиенту закон управления в виде u=kG(y,t) (**).Подставив (**) в уравнение объекта (*), получим уравнение замкнутой системы
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.