НОВОСИБИРСКИЙ ГОСУДАРСТВЕННЫЦ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
ТС-61
Калабин А.С.
2008г.
МИНИСТЕРСТВО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ
НОВОСИБИРСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
КАФЕДРА ПРИКЛАДНОЙ МЕХАНИКИ
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
К курсовому проекту по теории машин и механизмов
На тему: Анализ и синтез механизмов сенного пресса
Автор проекта: Калабин А.С.
Обозначение проекта: КП-206895-40-07-06
Группа: ТС-61
Руководитель проекта: Капустин В.И.
Проект защищён:
НОВОСИБИРСК 2008г.
1. СТРУКТУРНЫЙ АНАЛИЗ МЕХАНИЗМОВ
1.1Исходные данные
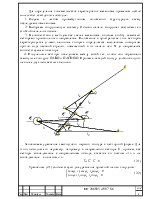
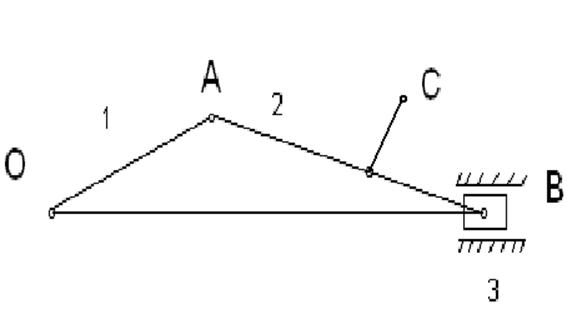
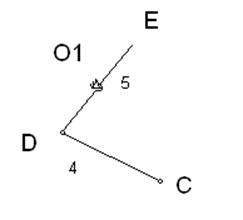
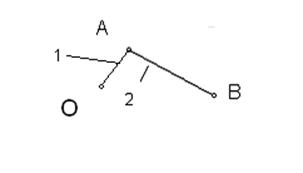
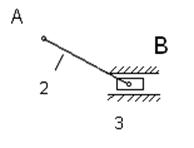
Производим структурный анализ механизма, изображенного на рис. 1.1. и в соответствии с данными, помещёнными в таблице 1.1.
Таблица 1.1.
Исходные величины
|
lOA, м |
lAB, м |
LAC, м |
LCB, м |
LCD, м |
LO1D м |
LO1E м |
X, м |
Y, м |
|
0,4 |
1,36 |
0.80 |
0.60 |
0.56 |
0.29 |
0.69 |
0,76 |
0,77 |
1.2. Решение
1. Структурная схема механизма приведена на рис. 1.2.
В данном механизме сложных и разнесенных кинематических пар нет.
2. Классификация кинематических пар механизма приведена в таблице 1.2.
Таблица 1.2. Классификация кинематических пар
|
№ |
Номер звеньев, образующих пару |
Условное обозначение |
Название |
подвижность |
Высшая – низшая КП |
Замыкание Геометрич.- силовое |
Открытая - закрытая |
|
1 |
0-1 |
|
вращательная |
1 |
Н |
геометрическое |
З |
|
2 |
1-2 |
|
вращательная |
1 |
Н |
геометрическое |
З |
|
3 |
2-3 |
|
поступательная |
1 |
Н |
геометрическое |
З |
|
4 |
3-4 |
|
вращательная |
1 |
Н |
геометрическое |
З |
|
5 |
4-5 |
|
поступательная |
1 |
Н |
геометрическое |
З |
|
6 |
5-0 |
|
вращательная |
1 |
Н |
геометрическое |
З |
|
7 |
2-3 |
|
вращательная |
1 |
Н |
геометрическое |
З |
В данном механизме одноподвижных кинематических пар P1=7и кинематических пар всего P=7
3. Проводим классификацию звеньев механизма. Она показана в таблице 1.3.
Таблица 1.3. Классификация звеньев механизма
|
№ п/п |
Номер звена |
Условное обозначение |
название |
движение |
Число вершин |
|
1 |
0 |
|
стойка (0) |
отсутствует |
- |
|
2 |
1 |
|
кривошип (1) |
вращательное |
2 |
|
3 |
2 |
|
шатун (2) |
сложное |
3 |
|
4 |
3 |
|
ползун |
поступательное |
2 |
|
5 |
4 |
|
шатун |
сложное |
2 |
|
6 |
5 |
|
коромысло |
колебательное |
2 |
4.Механизм имеет 4 двухвершинных звена, одно 3-вершинное, одно безвершинное. Механизм имеет 5 подвижных звеньев( n=5).
5. Находим число присоединений подвижных звеньев к стойке. Данный механизм имеет 3 присоединения к стойке.
6. Выделяем в данном механизме самостоятельные структурные группы, элементарные и простые механизмы и механизмы с разомкнутыми кинематическими цепями.
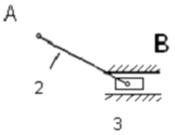
В исследуемом механизме можно выделить 1 элементарный механизм:
![]()
и два простых:
1- кривошипно-ползунный механизм
и второй – шарнирный двухзвенник
Механизмов с разомкнутыми кинематическими цепями в механизме нет.
7. Выявляем в исследуемом устройстве стационарные и нестационарные простые механизмы.
Станок имеет в своём составе только простые стационарные механизмы.
8. Выявляем звенья закрепления и присоединения. В исследуемый механизме звеньев закрепления нет. У него есть только одно звено присоединения 5-коромысло.
9. Классифицируем механизм станка. Исследуемый механизм имеет постоянную структуру, является сложным и однотипным. Он состоит из одного элементарного механизма и двух стационарных простых, которые имеют в своём составе только замкнутые КЦ.
10. Определяем подвижность простых механизмов.
Анализируя движение звеньев механизма и элементов КП можно установить, что механизм и простые механизмы, входящие в его состав, существуют в двухподвижном состоянии, в котором разрешены следующие простейшие независимые движения: поступательное вдоль оси х и вращательную вокруг оси z.
Найдём подвижность шатунно-ползунного механизма по формуле Чебышева:
W=3*n-2*p1-p2:
W=3*3-2*4=1
Найдём подвижность шарнирного двухзвенника:
W=3*2-2*2=2
Подвижность кулисного механизма определяется аналогично, W=1.
11. Определяем подвижность сложного механизма:
W=![]()
12. Выделяем структурные группы Асура:
![]()
![]()
В 1 и 2 группах 2 подвижных звена (двухвершинные). Обе группы содержат 3 одноподвижные КП, из которых две внешние.
13. Проводим классификацию структурных групп по И.И Артоболевскому:
|
№ |
Структурная схема |
Номер звеньев |
Класс, порядок, вид |
|
1 |
|
0-1 |
Механизм 1 класса |
|
2 |
|
4-5 |
2- класс 2- порядок 1- вид |
|
3 |
|
2-3 |
2- класс 2- порядок 2- вид |
14.Определяем класс сложного механизма.
Механизм сенного пресса относится ко второму классу.
2. Кинематический анализ рычажного механизма сенного пресса.
2.1. Определение крайних (мертвых) положений механизма.
Так как механизм является кривошипно-ползунным, то крайними положениями будут такие положения, когда кривошип и ползун, то вытягиваются, то складываются в одну линию (рис. 2.1). Тогда определятся начальный и конечный углы φн = 180˚, φк = 0˚, а углы рабочего и холостого хода φр = 180˚, φх = 180˚.
2.2. Определение положений звеньев механизма.
Для дальнейшего кинематического анализа, в частности, для определения положений звеньев и точек механизма, определения аналогов скоростей и ускорений графическим способом будем использовать угол, соответствующий первому положению начального звена механизма (φ2 = 150˚). Аналитически будем проводить кинематический анализ для 12 положений механизма.
2.3. Построение планов положений исследуемого механизма.
Построение планов положения проводим следующим образом.
1. Выбираем место расположения стойки начального звена и, соблюдая принятые обозначения, вычерчиваем ее.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.