|
Опыт 1 |
Опыт 2 |
Опыт 3 |
|
|
|
|
|
|
|
|
|
|
|
|
Для предварительной проверки правильности определения aij, bi следует найти из уравнения (29) величины е1, е2 , при которых U1=U2=0 , а затем провести эксперимент на объекте с этими значениями входов. Если U1@ U2 @0 можно переходить к следующему этапу работы.
![]()
![]()
![]()
![]()
![]()
![]() Далее проверяют
адекватность разработанной модели статики так, как описано в разделе 2.4
настоящего пособия, варьируя значения входа е1 (или е2 ) в диапазоне [0.5 е1 ,
1,5 е1 ]. (0.5 е2 , 1,5 е2 ) с шагом 0.125 е1 (0.125 е2 ) . Модель считают
адекватной, если приведенная погрешность не превышает 5 %.
Далее проверяют
адекватность разработанной модели статики так, как описано в разделе 2.4
настоящего пособия, варьируя значения входа е1 (или е2 ) в диапазоне [0.5 е1 ,
1,5 е1 ]. (0.5 е2 , 1,5 е2 ) с шагом 0.125 е1 (0.125 е2 ) . Модель считают
адекватной, если приведенная погрешность не превышает 5 %.
5. Содержание отчета
Каждый студент должен оформить отчет по работе, содержащий следующие разделы:1) титульный лист с названием работы; 2) содержание (этапы) работы; 3) описание структурной и параметрической идентификации объекта; 4) математическую модель объекта; 5) программу моделирования и укрупненную блок-схему программы; 6) результаты численных экспериментов; 7) результаты оценки адекватности модели; 8) заключение по работе.
В отчет необходимо внести все таблицы расчетов, схемы, графики, рисунки.
6. Варианты заданий
Таблица 1
Электрические схемы
|
Номер варианта |
Схема |
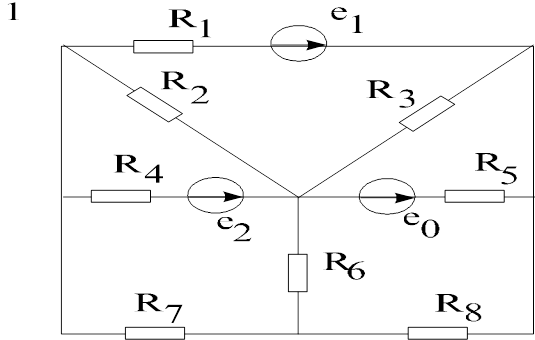
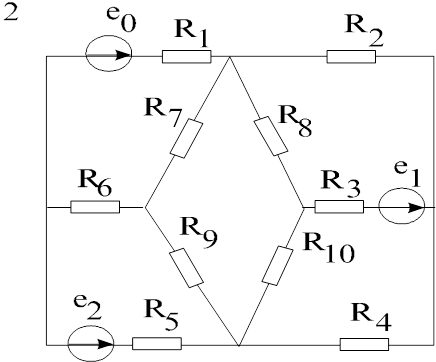
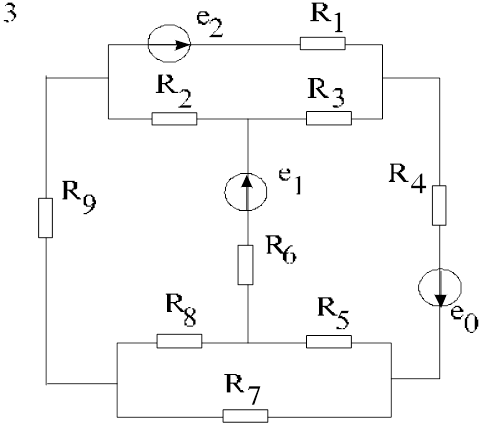
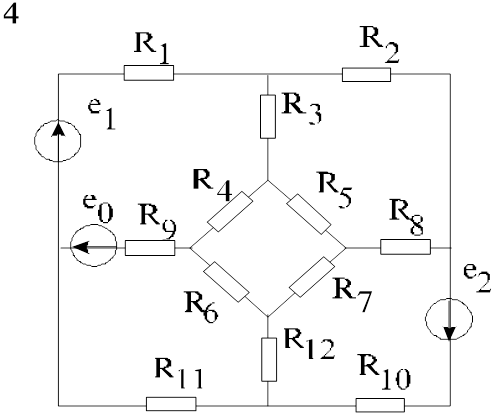
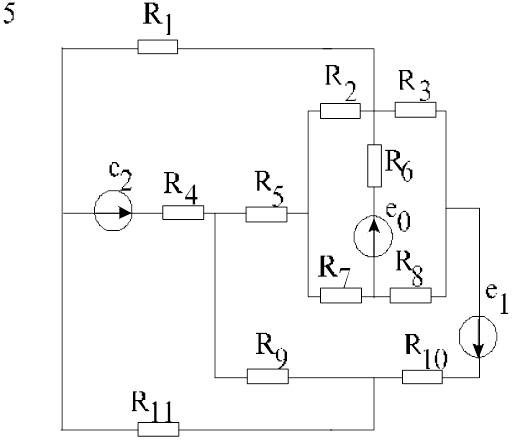
Таблица 2
Параметры элементов схемы
|
|
R1 Ом |
R2 Ом |
R3 Ом |
R4 Ом |
R5 Ом |
R6 Ом |
R7 Ом |
R8 Ом |
R9 Ом |
R10 Ом |
R11 Ом |
R12 Ом |
e0 |
e1 |
e2 |
|
1 |
70 |
80 |
90 |
100 |
110 |
60 |
50 |
40 |
30 |
20 |
10 |
20 |
90 |
50 |
40 |
|
2 |
50 |
40 |
30 |
20 |
10 |
110 |
100 |
90 |
80 |
70 |
60 |
30 |
40 |
70 |
60 |
|
3 |
40 |
50 |
110 |
120 |
80 |
90 |
30 |
20 |
10 |
70 |
60 |
100 |
80 |
30 |
90 |
|
4 |
80 |
120 |
60 |
100 |
20 |
40 |
50 |
10 |
30 |
110 |
90 |
70 |
20 |
70 |
100 |
|
5 |
100 |
90 |
70 |
50 |
30 |
10 |
20 |
40 |
60 |
80 |
100 |
120 |
10 |
20 |
90 |
|
6 |
100 |
60 |
70 |
10 |
20 |
30 |
90 |
80 |
120 |
110 |
50 |
40 |
40 |
80 |
60 |
|
7 |
120 |
100 |
80 |
60 |
40 |
20 |
10 |
30 |
50 |
70 |
90 |
110 |
60 |
30 |
60 |
|
8 |
30 |
35 |
10 |
15 |
20 |
40 |
60 |
70 |
30 |
20 |
10 |
40 |
70 |
110 |
20 |
|
9 |
70 |
60 |
50 |
90 |
80 |
10 |
20 |
30 |
40 |
45 |
65 |
80 |
50 |
30 |
70 |
Таблица 3
Входы объекта
|
Номер |
U1 ,В |
U2 ,В |
|
варианта |
падение напряжения на сопротивлении |
|
|
1 |
R1 |
R8 |
|
2 |
R2 |
R7 |
|
3 |
R3 |
R6 |
|
4 |
R4 |
R5 |
|
5 |
R2 |
R5 |
|
6 |
R4 |
R8 |
|
7 |
R1 |
R6 |
|
8 |
R3 |
R7 |
|
9 |
R3 |
R8 |
Практическое занятие 3
Синтез линейной САУ
1. Цель работы
Цель работы - ознакомление с методами исследования динамических характеристик систем управления, приобретение навыка оценки качества переходных процессов в САУ.
2. Общие сведения.
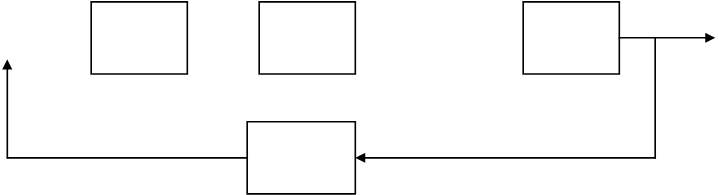
Исследуемая САУ представлена на рисунке
![]()
 j3 emm1lj
j3 emm1lj
¾¾®Ä¾¾®Wp(p) ¾¾® Wc(p) ¾¾®Ä¾¾®Wo(p)
ju
Wu(p)
Здесь приняты следующие обозначения:
Wp(p), Wc(p), Wo(p), Wu(p) — передаточные функции соответственно регулятора, исполнительного устройства, объекта управления и датчика;
j3,j, ju — соответственно заданное, действительное и измеренное значение регулируемой величины;
l — возмущающее воздействие.
Передаточная функция разомкнутой системы:
Wраз(p)= Wp(p)* Wc(p)* Wo(p)* Wu(p) (1)
а замкнутой по отношению к возмущающему воздействию l :
j(p) Wo(p)
W3(p)= -------- = ---------------- (2)
l(p) 1+ Wраз(p)
В соответствии с (2) процессы в системе описываются дифференциальным уравнением вида:
n-1 m
j(n)(t) + å aj * j(j)(t) = å bi * l(i)(t) (3)
j=0 i=0
d
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.