Степень близости этих реакций в каждый момент времени можно оценить, например, величиной квадрата модуля разности векторов выхода
m
![]()
![]() E =
| Y
(t) - Y (t) |^2 = å(Yi(t) - Yi (t)) ^2 (6)
E =
| Y
(t) - Y (t) |^2 = å(Yi(t) - Yi (t)) ^2 (6)
i=1
Для того чтобы начать процедуру идентификации необходимо иметь априорную информацию о структуре модели объекта и достаточном объеме измерительной (апостериорной) информации для определения параметров модели.
Априорная информация, которой необходимо располагать еще до наблюдения входов и выходов объекта, часто имеет качественный характер. Она должна ответить на вопрос, что представляет собой модели идентифицируемого объекта. Структура модели определяется в зависимости от основных свойств объекта.
В данной работе идентифицируется линейный статический детерминированный объект.
Объект является линейным, если его реакция на два различных возмущения входа эквивалентна сумме реакций на каждое из этих возмущений в отдельности (принцип суперпозиции) . Для случая без помех линейность определяется условием
F0 (X1+X2) = F0 (X1) + F0 (X2) (7)
При невыполнении этого условия объект является нелинейным.
Объект называется динамическим, если поведение его выхода зависит не только от значений входа в текущий момент времени, но и от предыдущих значений входа. Это означает, что объект обладает памятью ( или инертностью), которая определяет зависимость выхода от входа. В противном случае объект статический.
![]() Если поведение выхода объекта зависит
от неконтролируемых случайных входных возмущений (Z ¹ 0), то модель
объекта является стохастической . В детерминированной модели такой зависимости
нет или просто отсутствуют случайные возмущения (Z =
0).
Если поведение выхода объекта зависит
от неконтролируемых случайных входных возмущений (Z ¹ 0), то модель
объекта является стохастической . В детерминированной модели такой зависимости
нет или просто отсутствуют случайные возмущения (Z =
0).
![]() Процесс определения структуры
оператора F модели называют структурной идентификацией.
Если же структура этого оператора определена и априори известна, то процесс идентификации
сводится к определению параметров этой структуры по имеющейся измерительной
информации. Эту задачу называют параметрической идентификацией.
Процесс определения структуры
оператора F модели называют структурной идентификацией.
Если же структура этого оператора определена и априори известна, то процесс идентификации
сводится к определению параметров этой структуры по имеющейся измерительной
информации. Эту задачу называют параметрической идентификацией.
![]()
![]() Поведение
статического детерминированного объекта (Z = 0)
описывается функциональной зависимостью, связывающей вход X
и выход Y объекта
Поведение
статического детерминированного объекта (Z = 0)
описывается функциональной зависимостью, связывающей вход X
и выход Y объекта
![]()
![]() Y = F0 (X) (8)
Y = F0 (X) (8)
Естественно, что модель такого объекта должна представлять собой регулярную функцию
![]()
![]() Y = F ( X ) (9)
Y = F ( X ) (9)
2.3 Краткие сведения из теории идентификации линейного объекта
Рассмотрим теперь линейную функцию F и проанализируем специфику ее идентификации.
![]()
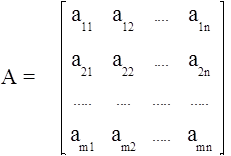
![]() Модель
статики линейного детерминированного объекта с n
входами Xj (j = 1, n ) и m выходами Yi(i = 1, m ) имеет единственно
возможную структуру и описывается системой линейных алгебраических уравнений :
Модель
статики линейного детерминированного объекта с n
входами Xj (j = 1, n ) и m выходами Yi(i = 1, m ) имеет единственно
возможную структуру и описывается системой линейных алгебраических уравнений :
ì y1 = a11x1 + a12x2 + ... + a1nxn + b1;
| y2 = a21x1 + a22x2 + ... + a2nxn + b2;
í ............................................ (10)
î ym = am1x1 + am2x2 + ... + amnxn + bm
где идентифицируются mn коэффициентов aij(i = 1, m ; j = 1, n).
Систему уравнений (10) можно записать в компактном виде в векторной форме
![]()
![]() Y=AX + B, (11)
Y=AX + B, (11)
![]() где
где
![]()
![]()
![]() X
= (X1, .... Xn ) ,
X
= (X1, .... Xn ) ,
![]() Y
= (Y1, .... Ym) , (12)
Y
= (Y1, .... Ym) , (12)
B = (b1, .... bm ) .
 (13)
(13)
Здесь Т - знак транспонирования.
Идентификации в данном случае подлежат вектор В и матрица А.
![]() Модель (10) можно рассматривать как
совокупность моделей с многомерным входом Xi (i = 1,n ) и одномерным выходом Y (m=1).
Модель (10) можно рассматривать как
совокупность моделей с многомерным входом Xi (i = 1,n ) и одномерным выходом Y (m=1).
Поэтому рассмотрим один выход объекта, то есть случай m=1 , n>1.
Модель такого объекта в векторной форме имеет вид:
![]() Y = a0 + < A, X
>,
Y = a0 + < A, X
>,
![]()
![]() где
< A, X > - скалярное
произведение векторов A = (a1, a2, ... an ) и X
= (X1, X2, ...Xn):
где
< A, X > - скалярное
произведение векторов A = (a1, a2, ... an ) и X
= (X1, X2, ...Xn):
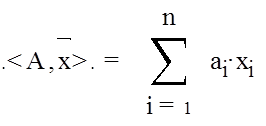
В скалярной форме модель объекта имеет вид:
![]() (14)
(14)
![]()
![]()
![]() Модель имеет n+1
неизвестных параметров ai (i =
0,n),которые подлежат оценке на основе измерений входов
и выхода объекта. Эта информация обычно представляется в виде N
соответствующих пар значений (Xj, Yj)
, где j=1, N , Xj = (X1j, X2j, .. Xnj )
- j-е состояние входа объекта, а Yj
- реакция объекта на этот вход.
Модель имеет n+1
неизвестных параметров ai (i =
0,n),которые подлежат оценке на основе измерений входов
и выхода объекта. Эта информация обычно представляется в виде N
соответствующих пар значений (Xj, Yj)
, где j=1, N , Xj = (X1j, X2j, .. Xnj )
- j-е состояние входа объекта, а Yj
- реакция объекта на этот вход.
![]() Обычным подходом к решению этой
задачи является приравнивание выходов объекта и модели в N
заданных точках (Xj, Yj) , в
результате чего получают следующую систему уравнений идентификации:
Обычным подходом к решению этой
задачи является приравнивание выходов объекта и модели в N
заданных точках (Xj, Yj) , в
результате чего получают следующую систему уравнений идентификации:
![]()
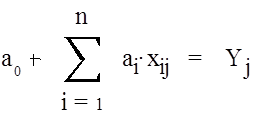 ( j = 1,N ) (15)
( j = 1,N ) (15)
Полученные N уравнений с n+1 неизвестными N ³ n+1 имеют однозначное решение, если матрица
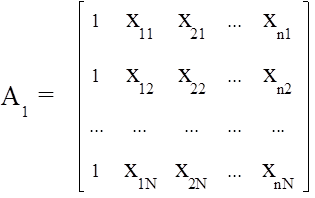 (16)
(16)
невырождена, т.е. det A1 ¹ 0
и, следовательно, ранг матрицы равен n+1. Это возможно в том случае, если найдется n+1 линейно независимая строка матрицы (16).
Поэтому из N строк следует выбрать n+1 линейно независимых строк ![]() ,где iÎ{1, N}.
,где iÎ{1, N}.
В этом случае из системы (15) будут выделены n+1 линейно независимых уравнений
В этом случае из системы (15) будут выделены n+1 линейно независимых уравнений
![]()
 (r = 1, n+1), (17)
(r = 1, n+1), (17)
![]()
![]()
![]() совместное
решение которых гарантирует определение точных оценок ai
(i = 0,n) идентифицируемых
параметров ai (i = 0,n) объекта , если, разумеется объект действительно линеен.
Покажем это.
совместное
решение которых гарантирует определение точных оценок ai
(i = 0,n) идентифицируемых
параметров ai (i = 0,n) объекта , если, разумеется объект действительно линеен.
Покажем это.
Подставим в систему уравнений (17) уравнение объекта
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.