По виду ЛАХ корректирующего устройства выбираем его схему и передаточную функцию [2,стр.542,табл.П.7]
Передаточная функция корректирующего устройства:
Из ЛАХ корректирующего устройства:
|
|
|
|
|
|
|
|
|
|
![]()
Тогда:
Выбираем по [9,стр.43,69] сопротивления и конденсаторы:
R2 = 5.6 кОм МЛТ-0.125, R1 = 220 кОм МЛТ-0.125 , C2 = 91 мкФ
Постоянные времени:
|
|
|
|
|
|
|
|
Передаточная функция скорректированной системы:
|
|
|
|
8.3.3.Анализ динамики скорректированной САУ.
Построение ФЧХ разомкнутой скорректированной системы.
Проверка по запасам устойчивости.
По передаточной функции разомкнутой скорректированной системы строим ее ФЧХ:
Qск(w) = å Qj(w)
![]()
Задаваясь значениями w находим Qj(w) и Qск(w):
|
w |
0.01 |
0.1 |
1 |
10 |
100 |
1000 |
|
lgw |
-2 |
-1 |
0 |
1 |
2 |
3 |
|
Qск(w) |
-11.6 |
-64.13 |
-88.31 |
-106.12 |
-179.9 |
-258.6 |
По данным таблицы строим ФЧХ скорректированной системы. Определяем запасы устойчивости по фазе и модулю:
h = 21 Дб , g = 75 градусов.
8.4 Параллельная коррекция переходного процесса
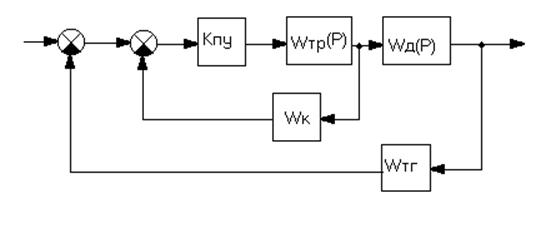
Рис. 11Структурная схема САУ при параллельной коррекции:
Передаточная функция звеньев, охваченных корректирующей связью:
то есть охвачены корректирующей связью ПУ и ТП.
Передаточная функция звеньев, неохваченных корректирующей связью:
Общая передаточная функция звеньев, охваченных корректирующей связью и корректирующего устройства:
Передаточная функция скорректированной системы при параллельной коррекции:
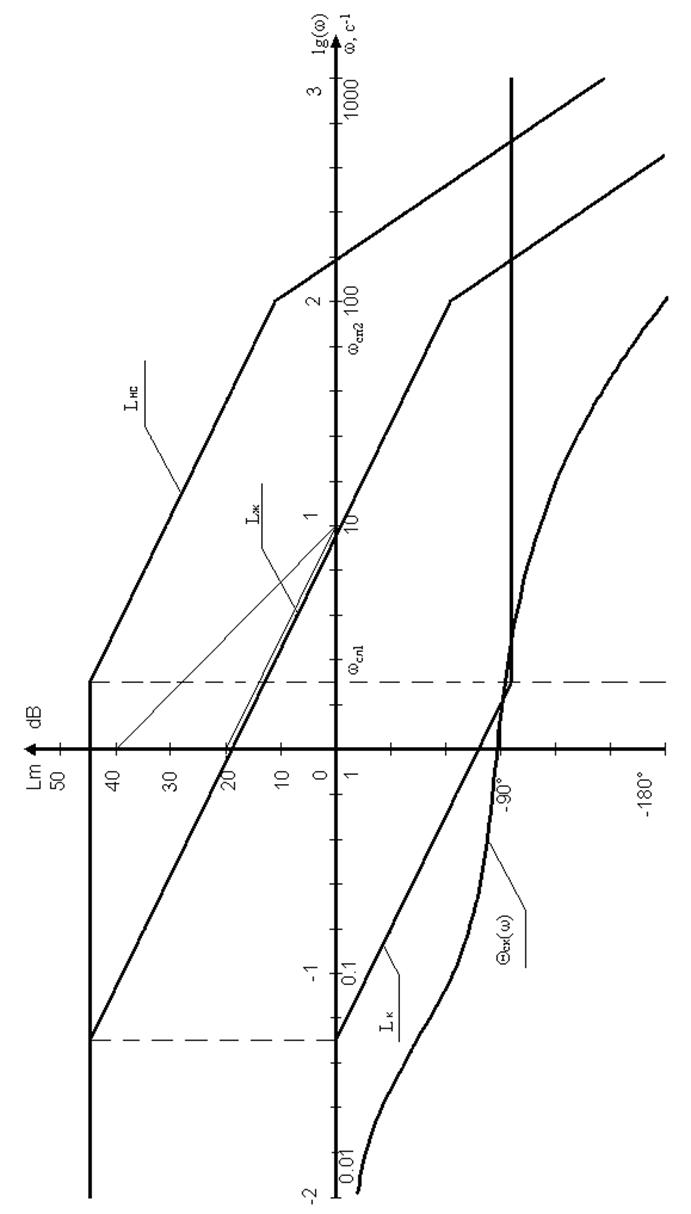
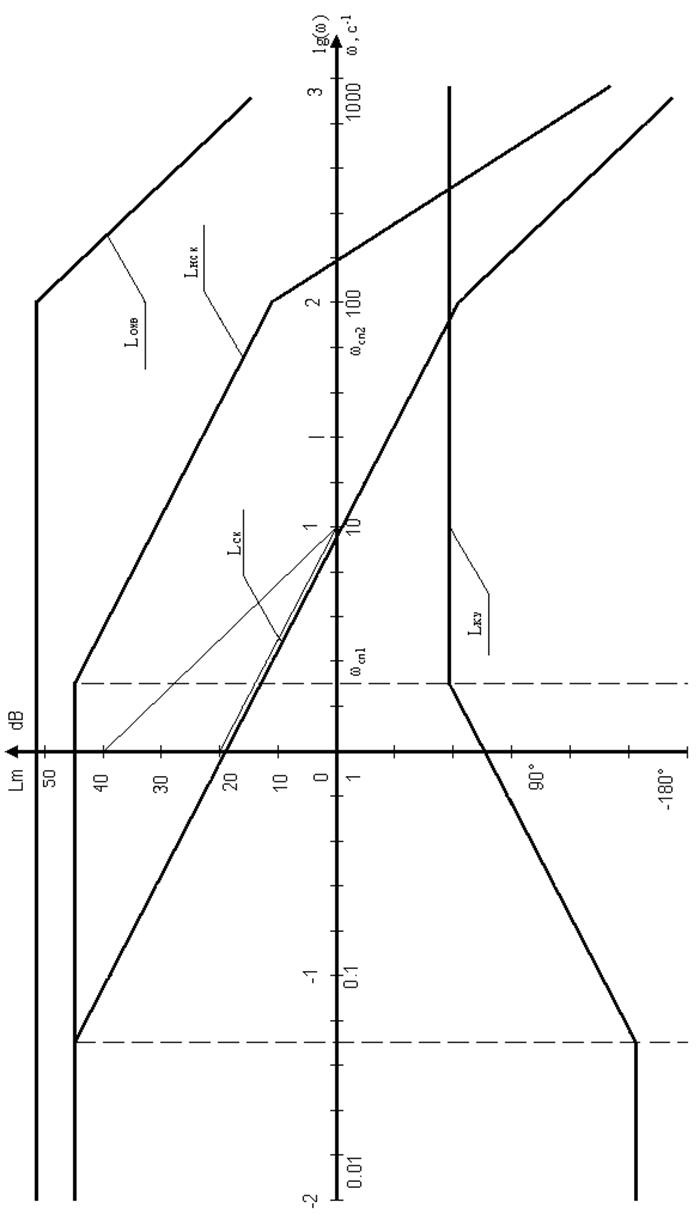
Тогда ЛАХ скорректированной системы:
Lск(w) = Lнск(w) - Lохв(w) - Lку(w), где: Lск(w) - ЛАХ скорректированной системы,
Lохв(w) - ЛАХ звеньев, охваченных корректирующей связью,
Lнск(w) - ЛАХ нескорректированной системы,
Lку(w) - ЛАХ корректирующего устройства (звена).
Отсюда:
Lку(w) = Lнск(w) - Lск(w) - Lохв(w)
Строим ЛАХ звеньев охваченных корректирующей связью:
Lохв(w) = L1(w) + L2(w)
где:
Частота сопряжения:
Вычитаем ординаты ЛАХ скорректированной системы Lск(w) и ординаты ЛАХ звеньев охваченных корректирующей связью Lохвw) из ординат ЛАХ нескорректированной системы, получаем ординаты ЛАХ корректирующего устройства.
По виду ЛАХ корректирующего устройства выбираем его схему и передаточную функцию [2,стр.475,табл.П.7]:
Рис. 13 ЛАХ и схема корректирующего устройства
Передаточная функция:

где:
Из построенной Lку(w):
Составляем систему уравнений относительно Ro,R1, Ri и C1:
Так как имеем три уравнения с четырьмя неизвестными, то принимаем :
![]()
Решая систему уравнений получаем:
Значения параметров КУ:
Ri = 75 кОм МЛТ-0.125,
R0 = 36 кОм МЛТ-0.125,
R1 = 22 Мом МЛТ-0.125,
С1= 1.2 мкФ МБГП.
8.5 Построение запретной области для ФЧХ скорректированной системы по заданной колебательности и оценка колебательности САУ.
Запретную область для ФЧХ при заданном показателе колебательности М = 1.1 строим в координатах Qск(w) [5,стр.10-11]. Для этого определим величины:
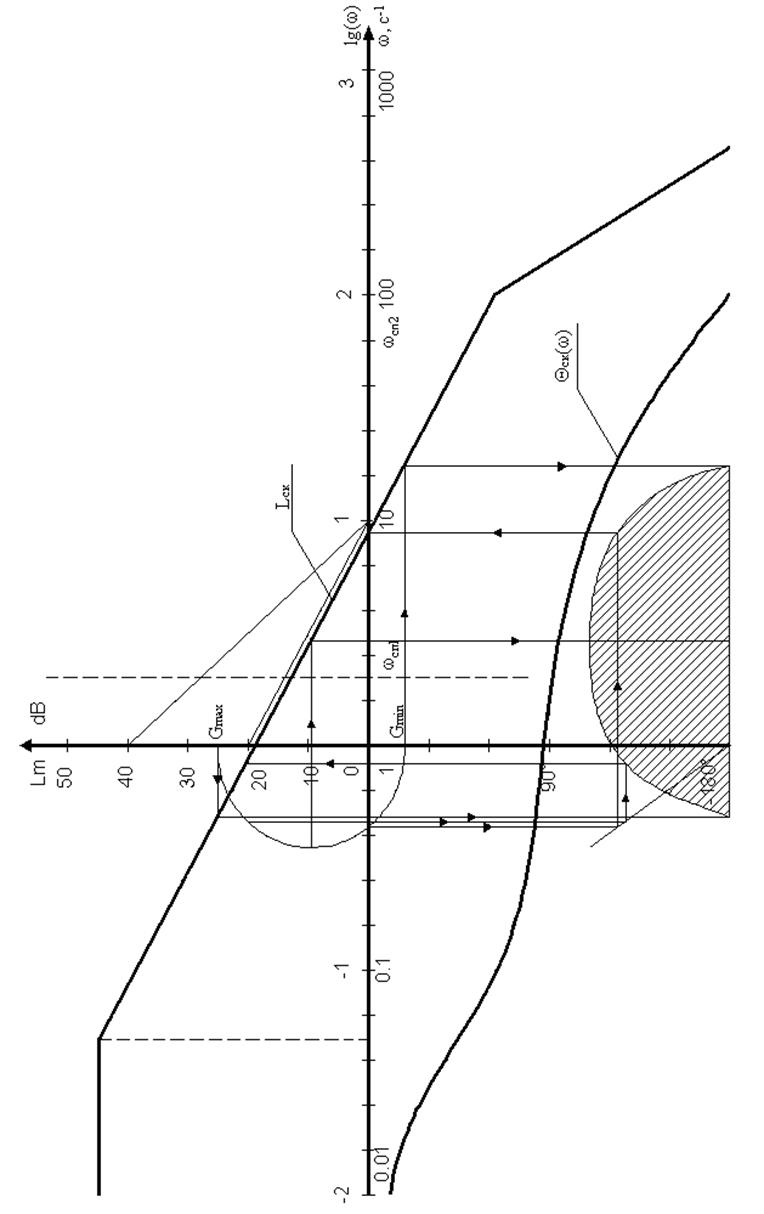
Уравнение ФЧХ скоректированной системы: Qск(w) = åQj(w)
![]()
Задаваясь значениями w находим Qск(w) и Qj(w):
|
w |
0.01 |
0.1 |
1 |
10 |
100 |
1000 |
|
lgw |
-2 |
-1 |
0 |
1 |
2 |
3 |
|
Qск(w) |
-14.748 |
-69.296 |
-88.942 |
-100.832 |
-152.863 |
-177.067 |
![]()
Кривая ФЧХ Qск(w) не заходит в запретную область, значит колебательность системы M<Mтр = 1.1
8.6.Построение области устойчивости . Определение диапазона настроек коэффициента усиления САУ.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.