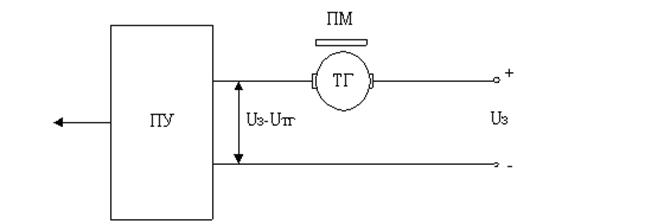
Элемент сравнения реализуется суммирующим звеном и описывается уравнением:
e = Uз-Uос, где: Uз - задающее напряжение,
Uос - напряжение с выхода цепи обратной связи.
4 Составление структурной схемы САУ
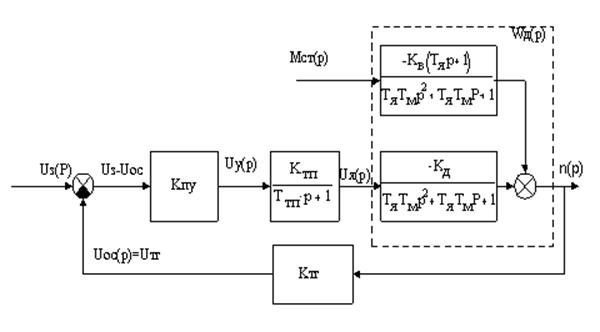
Рис. 5Структурная схема САУ
Структурная схема системы управления является математической моделью и отображает структуру преобразований сигналов в проектируемой САУ.
5 Выбор по каталогу функциональных звеньев САУ
Тиристорный преобразователь
Выбираем из [3] тиристорный преобразователь по выпрямленному току и напряжению по условию:
Ud>Uн , Id>Iп = (2 - 2.5)Iн , где: Uн - номинальное напряжение двигателя,
Iн - номинальный ток якоря двигателя,
Iп - пусковой ток двигателя.
Выбираем комплектный преобразовательный тиристорный агрегат КПТО-230/160-ТН. Его характеристики:
Id = 160 А, Ud = 230 В, Uс = 380 В.
Агрегат включает: силовой трансформатор ТСТО-230/100-М1, силовые блоки тиристоров, блоки управления, коммутационную аппаратуру. Выпрямительные группы включены встречно-параллельно и имеют раздельное управление.
Трансформатор ТСТО-230/100-М1 имеет следующие данные:
номинальная мощность Pн = 20 кВт
ВН U1н = 380 В
НН U2н = 230 В
потери Х.Х. Pхх = 140 Вт потери К.З. Pкз = 560 Вт напряжение К.З. Uкз = 4,5%
Тахогенератор
Тахогенератор выбираем из приложения [4,стр.32]:
тип ТМГ - 30П максимальная скорость вращения 4000 об/мин.
удельная ЭДС на 1000 об/мин 62.5 В
возбуждение с помощью постоянных магнитов.
6 Статический расчет параметров передаточных функций звеньев
Электромагнитная постоянная времени Tя определяется по формуле:

где: Lяц - индуктивность якорной цепи.
Rяц - сопротивление якорной цепи.
![]()
где: Lяд - индуктивность обмотки якоря двигателя,
2Lтр- индуктивность двух вторичных обмоток силового трансформатора,
Lур = 0 так как преобразовательный агрегат имеет раздельное управление вентильными группами.

Для некомпенсированных машин K = 6 [4]
Расчет параметров трансформатора
Тогда:
![]()
Сопротивление якорной цепи:
Отсюда:
Конструктивные коэффициенты двигателя:
Коэффициент передачи двигателя по управляющему воздействию:
Электромеханическая постоянная времени [6,стр.67]:

Для определения Ктп (коэффициент передачи тиристорного преобразователя) строим регулировочную характеристику:
Зададимся
значениями угла регулирования: ![]() . Строим зависимость Eda = f(a).
. Строим зависимость Eda = f(a).
|
a |
0 |
10 |
20 |
30 |
40 |
50 |
60 |
70 |
80 |
90 |
|
Eda,В |
310.5 |
305.8 |
291.8 |
268.9 |
237.9 |
199.6 |
155.3 |
106.2 |
53.9 |
0 |
|
Uсу,В |
12 |
10.66 |
9.33 |
8 |
8.66 |
5.33 |
4 |
2.66 |
1.33 |
0 |
Зная предельные значения напряжения на входе системы
управления ![]() В пересчитываем
зависимость Eda(a) в зависимость Eda(Uсу).
Зависимость Uсу(a)- линейна, поэтому при a = 0 скорость вращения двигателя
максимальна, а при a = 90
равна нулю.
В пересчитываем
зависимость Eda(a) в зависимость Eda(Uсу).
Зависимость Uсу(a)- линейна, поэтому при a = 0 скорость вращения двигателя
максимальна, а при a = 90
равна нулю.
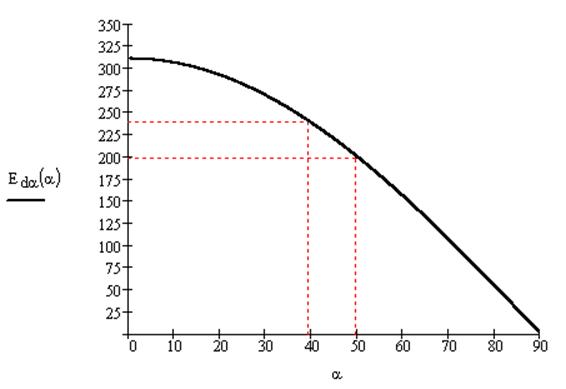
Рис. 6Регулировочная характеристика
Так как зависимость Eda(Uсу) - нелинейная, нужно ее линеаризовать в окрестности точки А (с номинальным напряжением 220 В). Проведем касательную в точке А. Зададимся отклонением DEda = 40 В и определим соответствующее отклонение DUсу.
Составляем пропорцию:
90 - 12 В
10.5 - DUсу
Отсюда:

Коэффициент передачи тиристорного преобразователя:
Постоянная времени ТП:
![]()
Тогда передаточная функция ТП:
Коэффициент передачи тахогенератора определим по величине удельной ЭДС 62.5 В при 1000 об/мин.

Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.