Обеспечиваем надежность электромеханической части системы, в соответствии с требуемыми показателями надежности, для этого строим нагрузочную диаграмму механической системы.
|
t, с |
0 |
10 |
20 |
30 |
40 |
50 |
60 |
70 |
80 |
90 |
100 |
|
M, Н*м |
0 |
60 |
40 |
30 |
0 |
-10 |
-80 |
-80 |
-10 |
60 |
80 |
Рис. 1 Нагрузочная диаграмма двигателя
Расчет эквивалентного значения момента:
Тогда суммарный эквивалентный момент:
![]()
Зададимся скоростью n=1500 об/мин и определим требуемую мощность двигателя:

По [1,стр. 405] выбираем двигатель П61.
Паспортные данные двигателя:

2 Выбор принципа управления
Принцип разомкнутого управления неприменим т.к. при наличии значительных возмущающих воздействий выходная величина может заметно отклониться от заданной, т.е. не контролируется по фактическому значению управляемой величины. Недостатком принципа регулирования по возмущению состоит в том, что в большинстве систем трудно измерить нагрузку, неполный учет возмущений (компенсируются только те возмущения, которые измеряются). Комбинированные регуляторы объединяют достоинства принципов управления по отклонению и по возмущению, но естественно конструкция их сложнее, а стоимость выше. Принцип адаптивного управления является наиболее эффективным, но он тоже более сложный и дорогостоящий.
Таким образом, наиболее приемлемым является принцип управления по отклонению, кроме того, заданные показатели статизма и переходного процесса удовлетворяются этим принципом. Для реализации этого принципа необходима обратная связь, заводящая регулируемую величину с выхода на вход. Для измерения скорости вращения вала необходимо поставить датчик скорости. Для получения сигнала ошибки - элемент сравнения.
Двигатель постоянного тока может управляться изменением напряжения на якоря. Для получения управляющего воздействия требуется усилитель мощности. Для обеспечения заданного статизма на всем диапазоне регулирования скорости может потребоваться промежуточный усилитель.
Для технической реализации этого принципа требуются функциональные звенья:
1. Двигатель постоянного тока независимого возбуждения.
2. Датчик скорости.
3. Усилитель.
4. Элемент сравнения.
5. Промежуточный усилитель.
Рис. 2 Функциональная схема
3 Определение передаточных функций звеньев
Двигатель постоянного тока независимого возбуждения
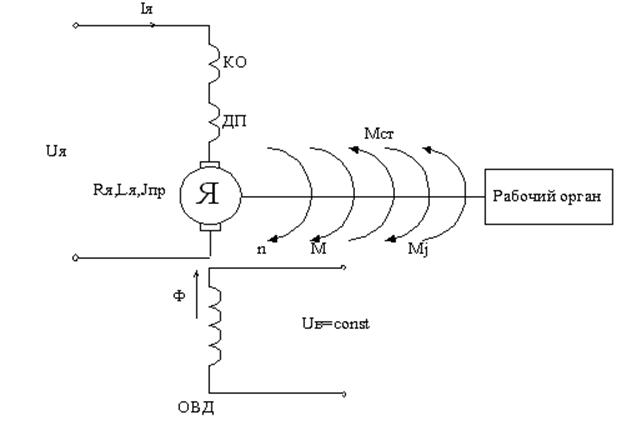 |
Рис. 3Схема двигателя постоянного тока независимого возбуждения
Из [4, стр.6] дифференциальное уравнение для двигателя постоянного тока независимого возбуждения:
![]()
где Tя - электромагнитная постоянная времени,
Tм - электромеханическая постоянная времени,
n - скорость вращения,
Kд - коэффициент передачи двигателя по управляющему воздействию,
Uя - напряжение на якоре двигателя,
Kв - коэффициент передачи по возмущающему воздействию,
Mст - статический момент.
По приведенному выше дифференциальному уравнению можно построить структурную схему двигателя:
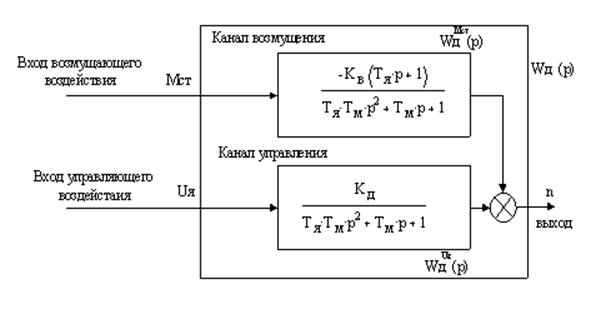
Рис. 4Структурная схема двигателя
Запишем выражение передаточной функции двигателя по управляющему (Mcт = 0 , DMст = const) и по возмущающему (Uя = 0, DUя = const) воздействию, для этого дифференциальное уравнение двигателя запишем в операторной форме:
![]()
Отсюда:


Тиристорный преобразователь
Тиристорный преобразователь (ТП) может быть представлен инерционным звеном первого порядка. Запишем передаточную функцию ТП:
где: Uтп(p) - напряжение на выходе ТП,
Kтп - коэффициент передачи ТП,
Tтп - постоянная времени ТП,
Uу - напряжение управления ТП.
Тахогенератор
Датчик скорости представим усилительным звеном:
Wтг(p) =Kтг
Промежуточный усилитель
Wпу(p) = Kпу
Элемент сравнения
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.