Рис. 7Схема включения тахогенератора
Коэффициент усиления разомкнутой системы Кр.тр , обеспечивающий в замкнутой системе требуемую статическую ошибку dтр = 1.2% и диапазон регулирования Д = 20, определяется по [4.стр.14]:
где Dnр% - статическая ошибка разомкнутой системы тиристорный преобразователь- двигатель.
Статическая ошибка разомкнутой системы ТП-Д из [6,стр.101]:
Тогда:

Коэффициент усиления промежуточного усилителя:

Определяем максимальную величину задающего напряжения Uзmax. Эта величина определяется из равенства:
![]()
При этом напряжении будет осуществляться стабилизация скорости потому, что рассогласование равно нулю. Регулирование скорости двигателя будет осуществляться при уменьшении Uз < Uзmax.
![]()
7 Принципиальная упрощенная схема нескорректированной САУ
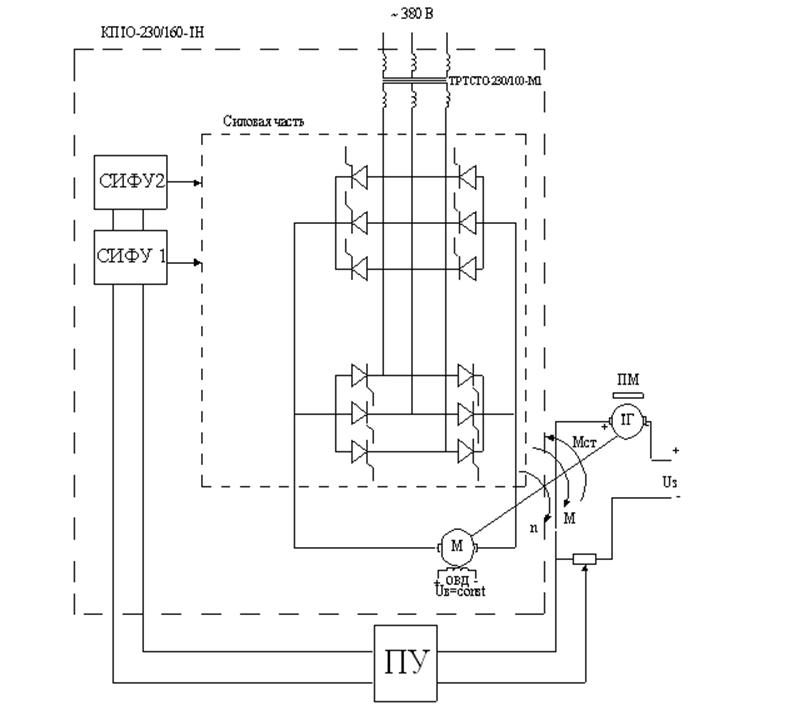
Рис. 8Принципиальная упрощенная схема нескорректированной САУ
ТР- силовой трансформатор ТСТО-230/100-М1
ТП - тиристорный преобразователь
ПУ - промежуточный усилитель
ТГ - тахогенератор ТМГ- 30П
D - двигатель постоянного тока П52
8 Расчет динамики САУ
8.1. Определение передаточных функций разомкнутой и замкнутой САУ по управляющему, возмущающему воздействиям и по ошибке
Представим структурную схему САУ [4,стр.18]:
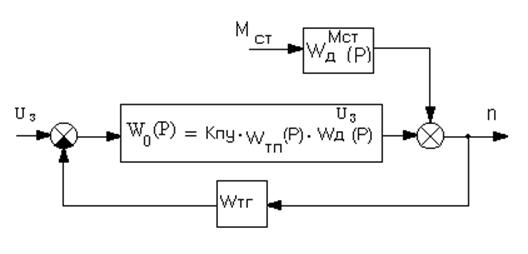
Рис. 9Структурная схема САУ для определения передаточной функция по управляющему воздействию
Уравнение замыкания САУ:
e(p) = Uз(р) - Uтг(р)
Уравнение замкнутой САУ:
![]()
Получилась система уравнений:
Подставляя (2) и (3) в (1) получим:
Передаточная функция замкнутой САУ по управляющему воздействию:



Передаточная функция замкнутой САУ по возмущению:

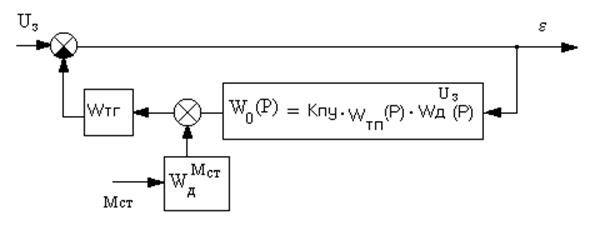
Рис. 10Структурная схема САУ для определения передаточной функция по ошибке
Передаточная функция замкнутой САУ по ошибке:

8.2 Оценка качества переходного процесса по логарифмической и амплитудно-частотной характеристикам разомкнутой системы
Передаточная функция разомкнутой системы:

Система состоит из трех звеньев: усилительного, апериодического, звена второго порядка. Так как в звене второго порядка коэффициент демпфирования равен:
значит двигатель может быть представлен как два апериодических звена [4,стр.21].
Тогда передаточная функция разомкнутой системы:

Постоянные времени апериодических звеньев:
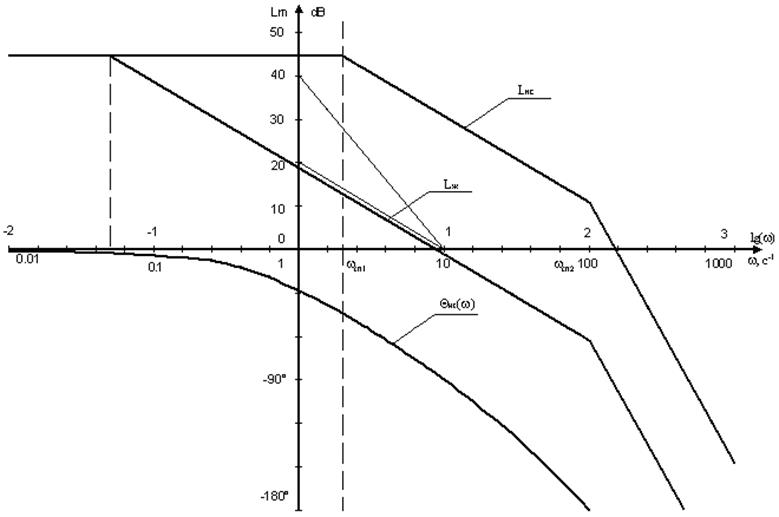
Уравнение ЛАХ системы Lнс(w) = åLj(w)
Построение ЛАХ осуществляем с помощью метода асимптот. Находим частоты сопряжения:
Уравнение ФЧХ системы: Qнс(w) = åQj(w)
![]()
Задаваясь значениями w находим Qнс(w) и Qj(w):
|
|
0.01 |
0.1 |
1 |
10 |
100 |
1000 |
|
lgw |
-2 |
-1 |
0 |
1 |
2 |
3 |
|
Qнс(w) |
-0.093 |
-0.933 |
-9.283 |
-69.878 |
-193.594 |
-260.928 |
![]() Анализ ЛАХ и ФЧХ
показывает, что система неустойчива так как ФЧХ пересекает линию -p в области опасных модулей. Система
нуждается в коррекции.
Анализ ЛАХ и ФЧХ
показывает, что система неустойчива так как ФЧХ пересекает линию -p в области опасных модулей. Система
нуждается в коррекции.
8.3 Последовательная коррекция переходного процесса
8.3.1 Построение желаемой ЛАХ САУ
По заданным показателям качества переходного процесса tпп = 1 c, sтр = 30%, М = 1.1 строим желаемую ЛАХ Lж(w) = Lск(w).
Для того что бы построить желаемую ЛАХ определим ее частоту среза по [5,стр.4]:

где Ко - коэффициент, который выбирается по рис.1 в [5,стр.4]
Проводим через точку wср прямую с наклоном -20 Дб/дек до пересечения с Lнс(w) в низкочастотной области, получим частоту сопряжения:
![]()
В высокочастотной области для получения наиболее простого корректирующего устройства желательно что бы наклон желаемой ЛАХ совпадал с наклоном ЛАХ нескорректированной системы. Частоты сопряжения в высокочастотной области:

8.3.2. Расчет параметров корректирующей цепи.
ЛАХ корректирующего устройства: Lк(w) = Lск(w) - Lнск(w).
Вычитаем ординаты ЛАХ нескорректированной системы из ординат ЛАХ скорректированной системы получаем ординаты ЛАХ корректирующего устройства.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.