5) иметь высокую жесткость;
6) иметь минимальные зазоры в сочленениях.
Рулевые приводы классифицируют по нескольким признакам: по типу используемых механизмов (механические, гидравлические, гидромеханические, электромеханические); по конструкции и компоновке (с неразрезными и разрезными трапециями, с бортовыми и осевыми трапециями, с передним и задним расположением трапеций); по выполняемой функции (с командным приводом, с силовым приводом).
Наиболее распространены механические приводы, особенно на автомобилях с управляемыми колесами одной оси, вследствие их относительной простоты и надежности.
6.2. Оценочные параметры рулевого привода
Оценочными параметрами рулевого привода являются:
- кинематическое передаточное число;
- силовое передаточное число;
- КПД и жесткость привода.
Кинематическое передаточное число uРП определяется как отношение элементарного угла поворота сошки dW к полусумме элементарных углов поворота цапф управляемых колес:
 ,
,
|
где |
|
– углы поворота соответственно левой и правой цапф. |
Силовое передаточное число UПС определяется как
 ,
,
|
где |
|
– суммарный момент на поворотных цапфах управляемых колес; |
|
|
– момент на сошке. |
Передаточные числа привода переменные вследствие изменения соотношения плеч рычагов. Кроме того, из-за несимметричности привода эти числа могут быть различными при повороте автомобиля вправо и влево. Следовательно, будет переменным и усилие на рулевом колесе в процессе поворота.
Отношение силового передаточного числа к кинематическому соответствует КПД привода:
 .
.
Для выполненных рулевых приводов автомобилей КПД составляет
![]() .
.
Жесткость рулевого привода должна быть наибольшей. При недостаточной жесткости возникает виляние колес и, как следствие, плохая устойчивость автомобиля. Из-за малой жесткости будет нарушаться сходимость колес, а это отрицательно сказывается на работе шин и расходе топлива. Жесткость рулевого привода у автомобилей с независимой подвеской в 1,5...2,0 раза меньше, чем у автомобилей с зависимой подвеской.
6.3. Выбор типа рулевого привода
Вследствие относительной простоты и надежности на автомобилях с управляемыми колесами одной оси наибольшее распространение получили механические приводы, состоящие из рулевых трапеций, рычагов поворотных цапф, продольных тяг и сошек.
Рулевая трапеция является частью рулевого привода и обеспечивает требуемую зависимость между углами поворота управляемых колес. Рулевые трапеции классифицируют по расположению относительно оси вращения колес (передние и задние) и по конструкции (неразрезные и разрезные). Рулевую трапецию чаще всего располагают сзади управляемых колес. В этом случае она хорошо защищена поперечной подвеской или балкой моста от повреждения.
Автомобили с зависимой подвеской имеют неразрезную поперечную тягу (см. рис. 6 а, д...к). При независимой подвеске эта тяга выполняется разрезной, состоящей из двух или трех звеньев (см. рис. 6 б, в, г, ж, з), что обеспечивает возможность независимого перемещения управляемых колес. Для регулирования схождения управляемых колес тяги имеют резьбовые наконечники с шарнирами. Повышение точности регулировки достигается применением левой и правой резьб. Шарниры, типовые конструкции которых представлены на рис. 9, выполняют сферическими, так как сопряженные части привода совершают сложные относительные перемещения.
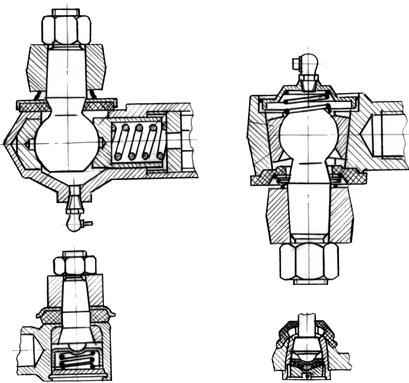
Рис. 9. Шаровые шарниры рулевого привода автомобилей:
а – с пружинами, действующими по оси тяги; б…г – с пружинами, действующими по оси пальца
В современных конструкциях постоянную плотность сопряжения головки 1 шарового пальца с вкладышами 2 поддерживают при помощи пружин 3, действующих вдоль осей тяги или пальца. Пальцы шарниров выполняют шаровыми полносферными (см. рис. 9 а, б), двухсферными (см. рис. 9 в), коническими (см. рис. 9 г). В двухсферных пальцах полусфера большего радиуса является рабочей, а меньшего - направляющей. Размеры пальцев с шаровыми головками выполняются в соответствии с ОСТ 37.001.233-80.
6.4. Материалы, используемые для изготовления рулевых
приводов
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.